Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Panther Watercar
- Topicstarter Lex Verkuijl
- Startdatum
That's not ready yet ... I will post it when it is.
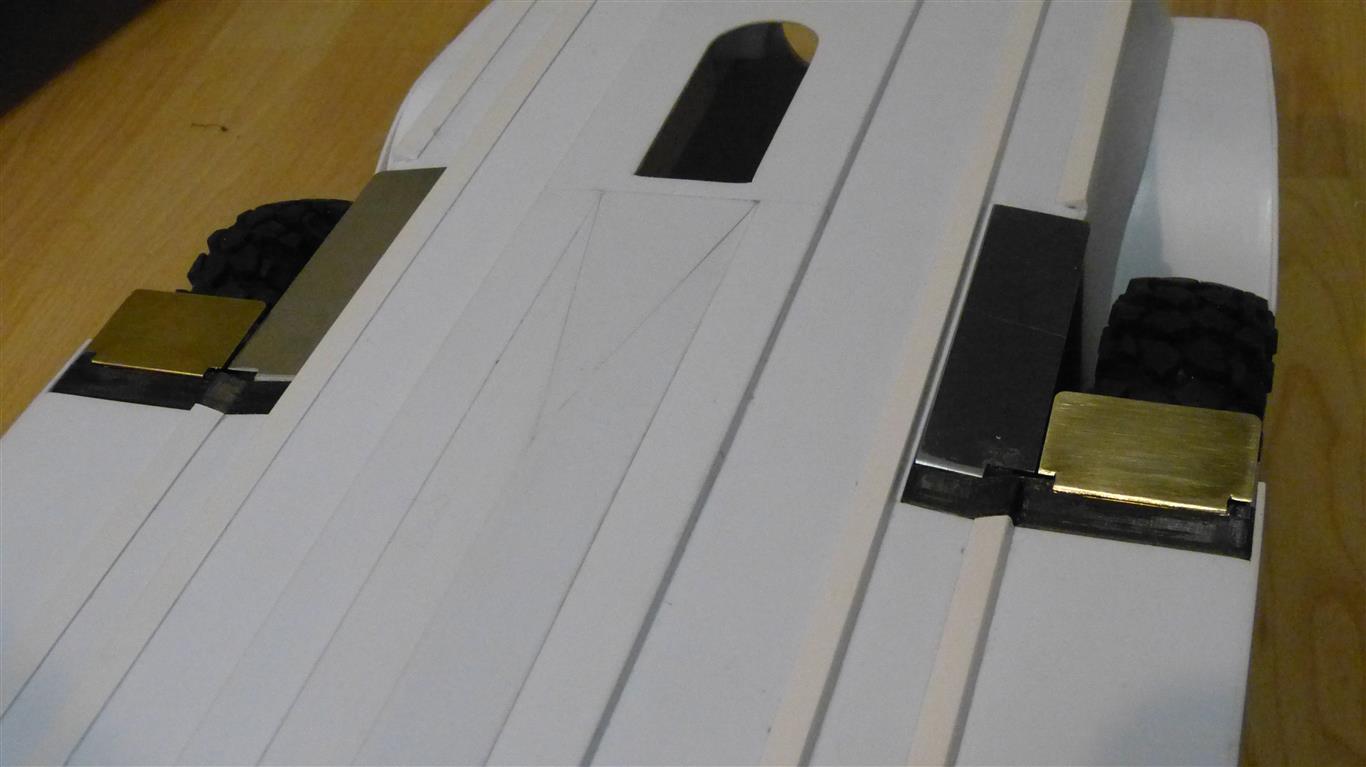
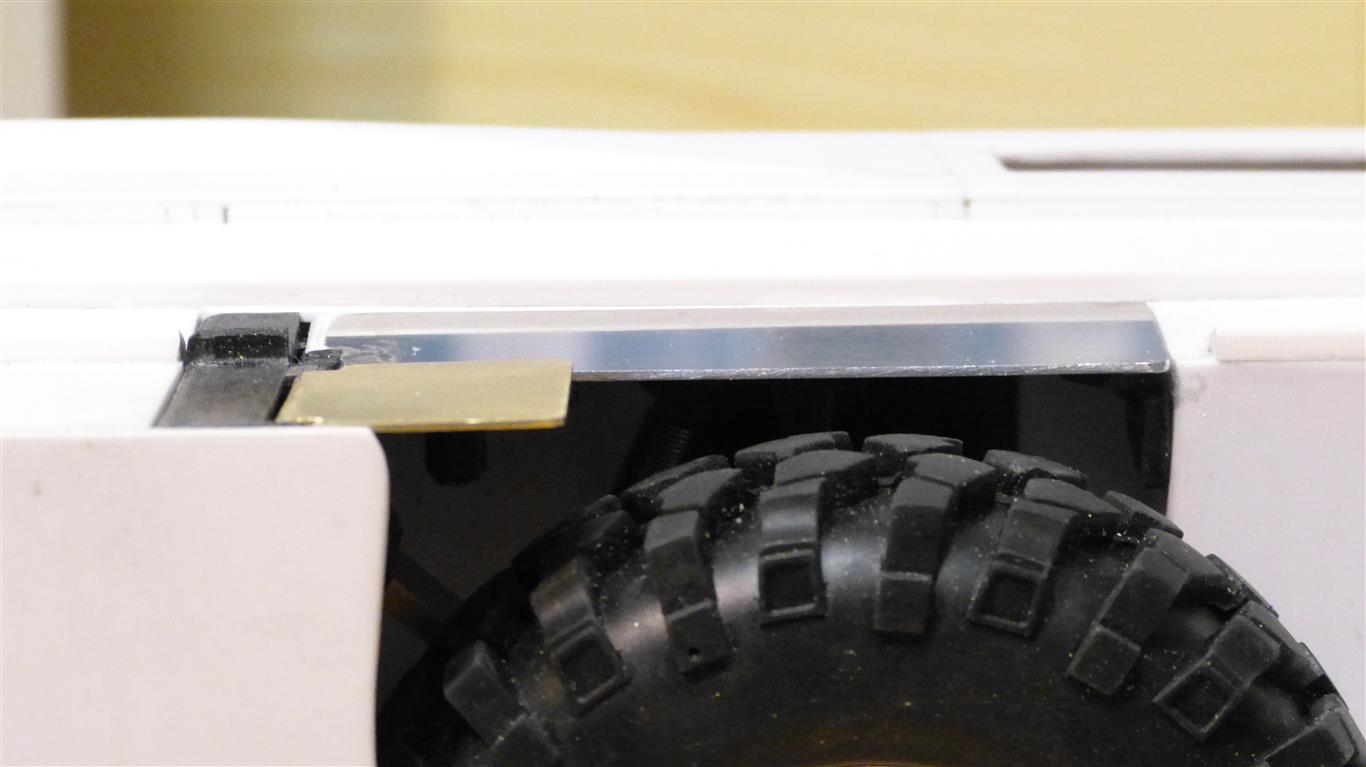
Ook de kleppen onder de achterwielophanging zijn nu klaar
Bij neergelaten wiel, de open stand
In gesloten stand
Onder de buitenste klep zit een aanslagschroef waarmee ik straks de stand af kan regelen. Deze moeten namelijk de waterstroom onder de banden door geleiden, dat is vooral bij het in plané komen belangrijk voor de weerstand.
Zo ziet het glijvlak er nu dus uit. Alleen nog de spray rails over de kleppen door laten lopen.
Bij neergelaten wiel, de open stand

In gesloten stand
Onder de buitenste klep zit een aanslagschroef waarmee ik straks de stand af kan regelen. Deze moeten namelijk de waterstroom onder de banden door geleiden, dat is vooral bij het in plané komen belangrijk voor de weerstand.
Zo ziet het glijvlak er nu dus uit. Alleen nog de spray rails over de kleppen door laten lopen.

Het stuursysteem werkt ook.
Die bussen door de zijkanten heen zijn stuurstang afdichtingen zoals die ook in rc duikboten gebruikt worden.
Bewegende beelden:
En om het ook nog wat water-gerelateerd te houden hier") .... de Jet is ingebouwd!
.... de Jet is ingebouwd!

Die bussen door de zijkanten heen zijn stuurstang afdichtingen zoals die ook in rc duikboten gebruikt worden.
Bewegende beelden:
En om het ook nog wat water-gerelateerd te houden hier
.... de Jet is ingebouwd!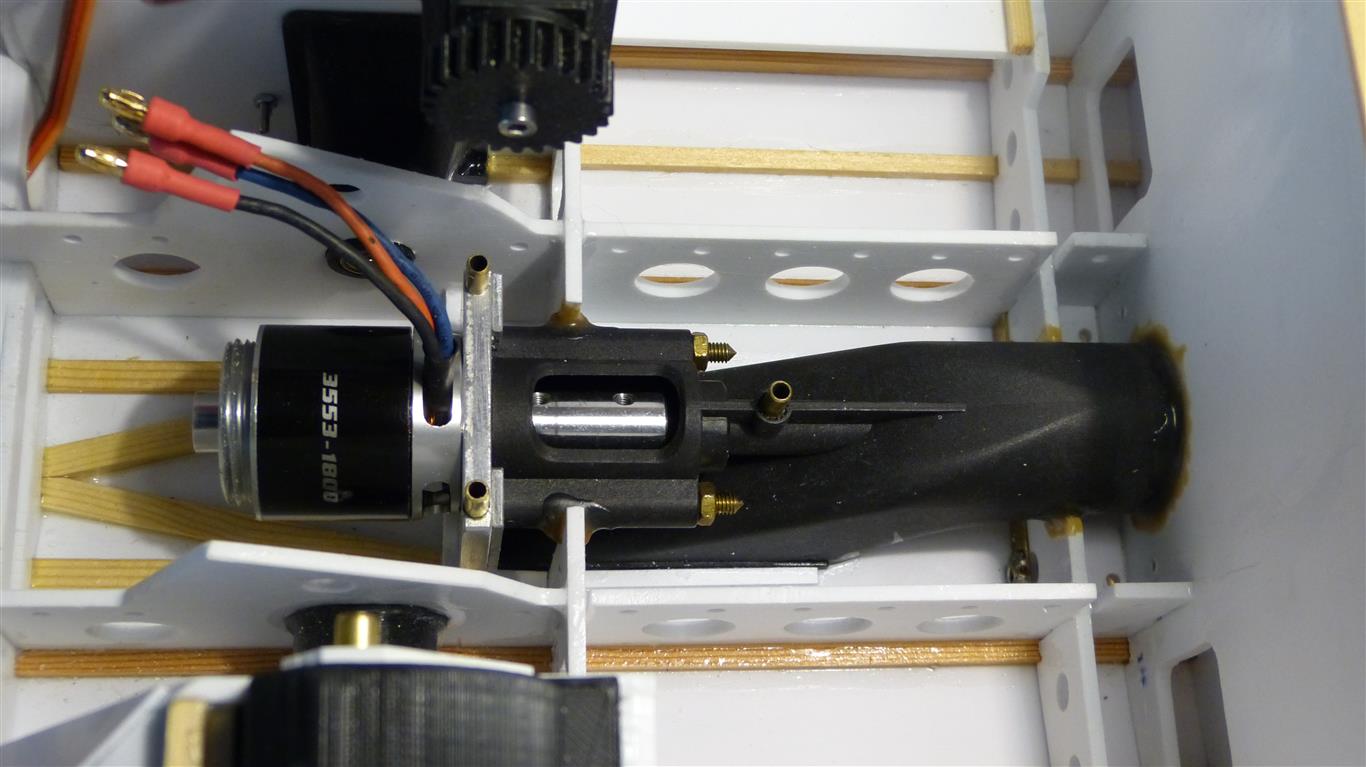
Laatst bewerkt:
ik houw er van mooi draad.
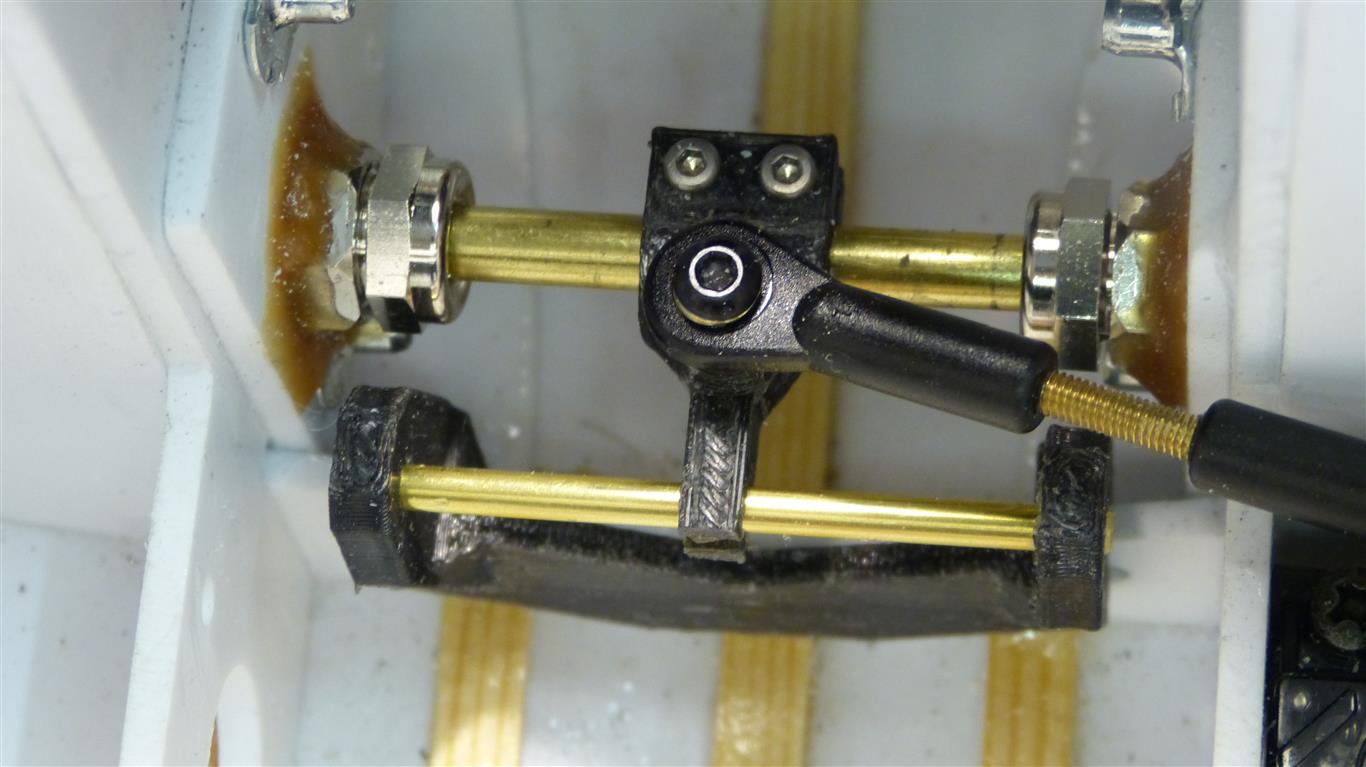
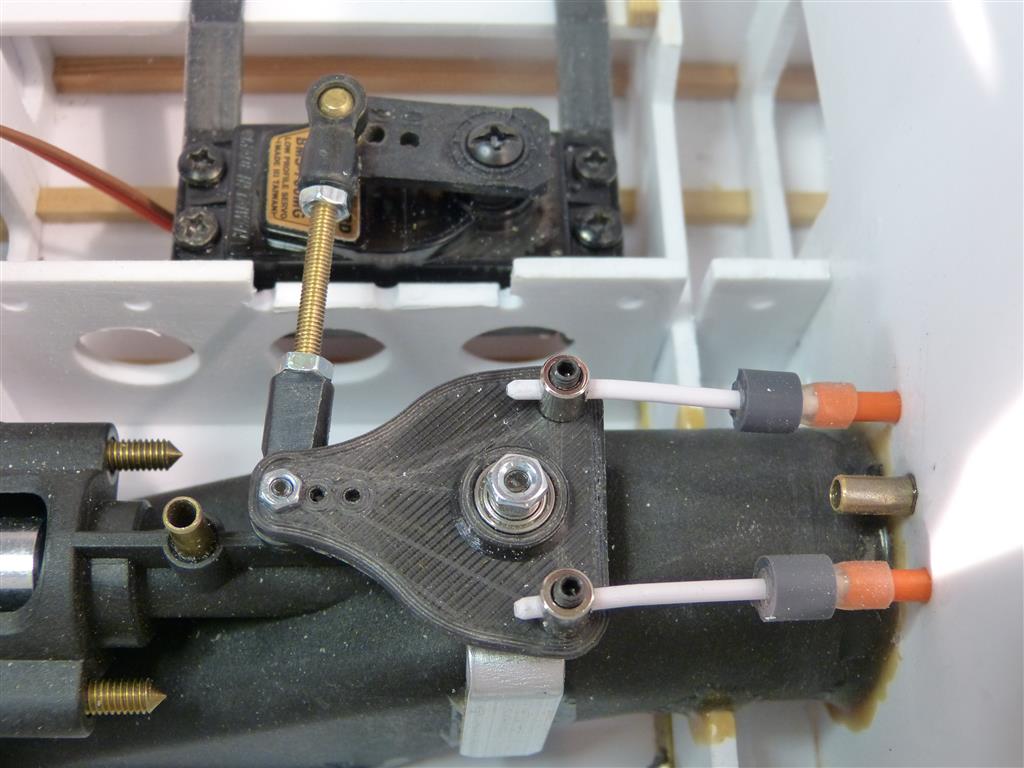
Ook aan de achterzijde kan er nu van richting veranderd worden, de sturing voor de jet is klaar.
Geprinte hevel om haaks om te kunnen gaan, kogelgelagerd. 'Normaal' zou je waarschijnlijk de servo op z'n kop op de plek van die hevel inbouwen, maar daar moet de motor plus gearbox voor de achterwielaandrijving komen. Afdichting hier met stukjes siliconenslang die met een stukje dikkere slang (zwart) voor iets meer druk net klemmend op de bowdenkabeltjes afdichten.
Aan de buitenkant de stuurnozzle.
Deze is voorzien van messing draaibusjes. Direct de M2 schroefjes in het materiaal laten draaien (soort giethars geloof ik) zoals Kehrer in gedachte heeft leek me niet zo'n betrouwbaar idee. De kogelkopjes zaten nog in mijn 'doosje over' en stammen uit één of ander Tamiya model geloof ik.
Het beweegt ook natuurlijk:
Verder nu met de steun voor genoemde motor met gearbox, en het differentieel dat boven de jet outrunner komt te hangen.
Geprinte hevel om haaks om te kunnen gaan, kogelgelagerd. 'Normaal' zou je waarschijnlijk de servo op z'n kop op de plek van die hevel inbouwen, maar daar moet de motor plus gearbox voor de achterwielaandrijving komen. Afdichting hier met stukjes siliconenslang die met een stukje dikkere slang (zwart) voor iets meer druk net klemmend op de bowdenkabeltjes afdichten.
Aan de buitenkant de stuurnozzle.

Deze is voorzien van messing draaibusjes. Direct de M2 schroefjes in het materiaal laten draaien (soort giethars geloof ik) zoals Kehrer in gedachte heeft leek me niet zo'n betrouwbaar idee. De kogelkopjes zaten nog in mijn 'doosje over' en stammen uit één of ander Tamiya model geloof ik.
Het beweegt ook natuurlijk:
Verder nu met de steun voor genoemde motor met gearbox, en het differentieel dat boven de jet outrunner komt te hangen.
Laatst bewerkt:
Vermoedelijk teveel uitslag voor een jet, maar dat is op de zender eenvoudig te verhelpen t.z.t.
Mooie oplossing in ieder geval!
Mooie oplossing in ieder geval!
Ik heb hem voor nu gewoon op maximaal mogelijk afgeregeld. "Niet omdat het moet, maar omdat het kan"...  Als de boel vaart maar eens kijken wat het moet gaan worden.
Als de boel vaart maar eens kijken wat het moet gaan worden.
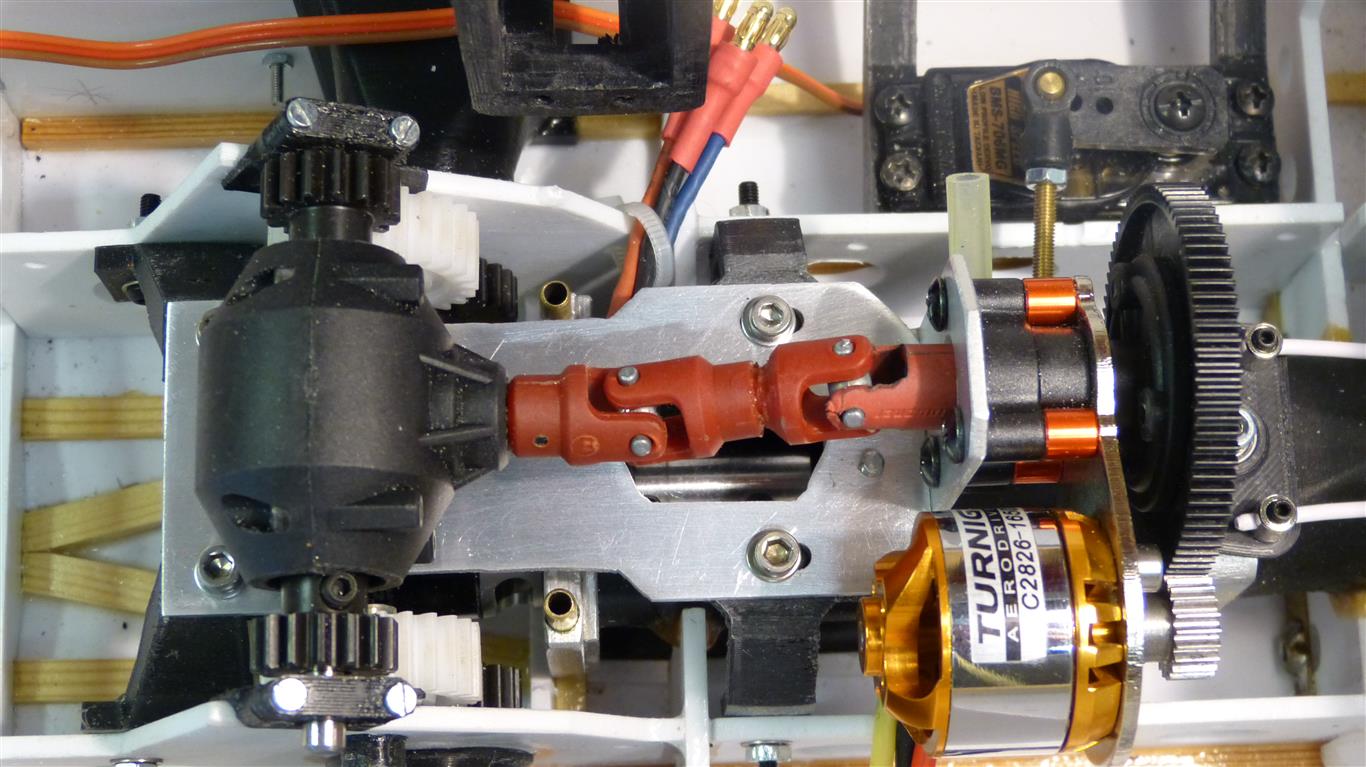
Als de boel vaart maar eens kijken wat het moet gaan worden.Weer wat verder, de aandrijving werkt nu ook. Die op de achterwielen bedoel ik dan ..
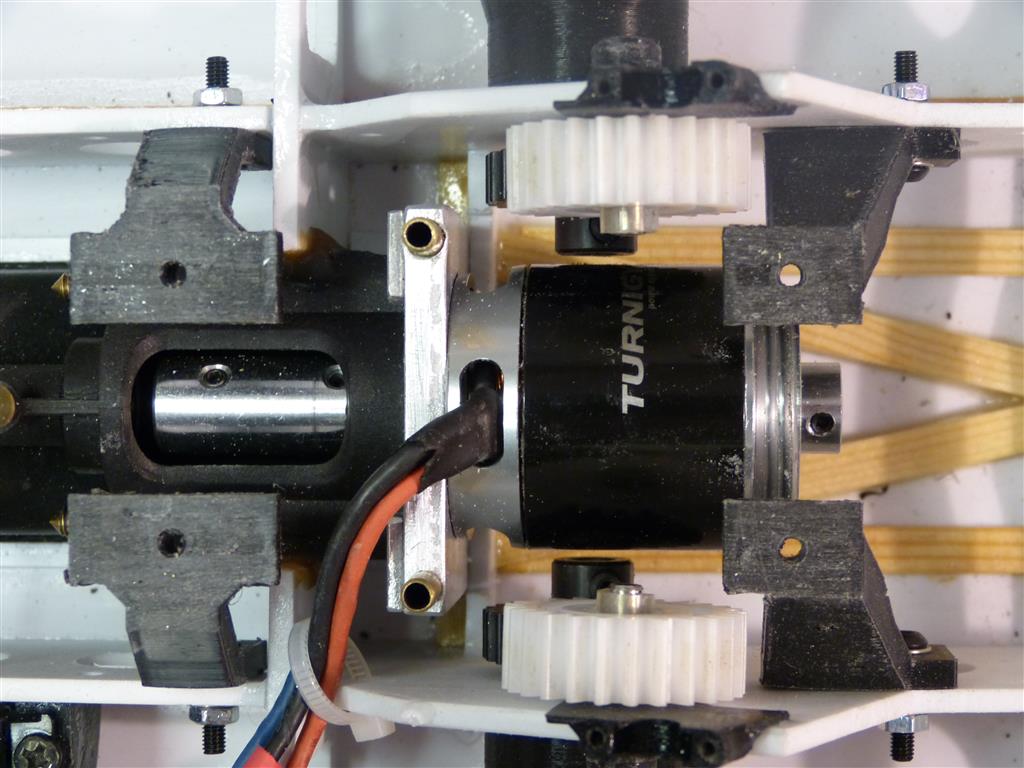
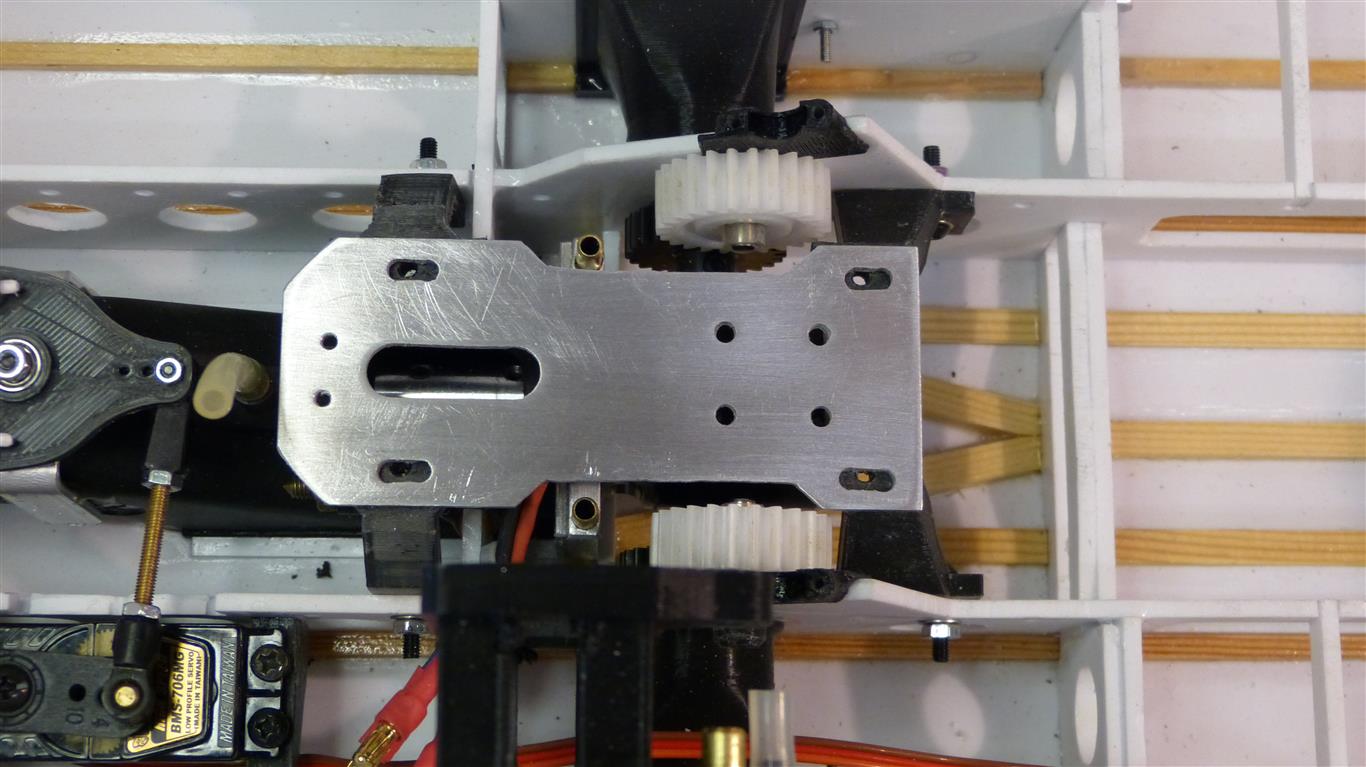
Eerst de tandwieltreinen links en rechts gemonteerd. Past volgens plan met 1-1,5mm speling met de jet-ourttrunner.
Dan een alu montageplaatje gemaakt die met geprinte steuntjes tegen de hoofdliggers gemonteerd wordt
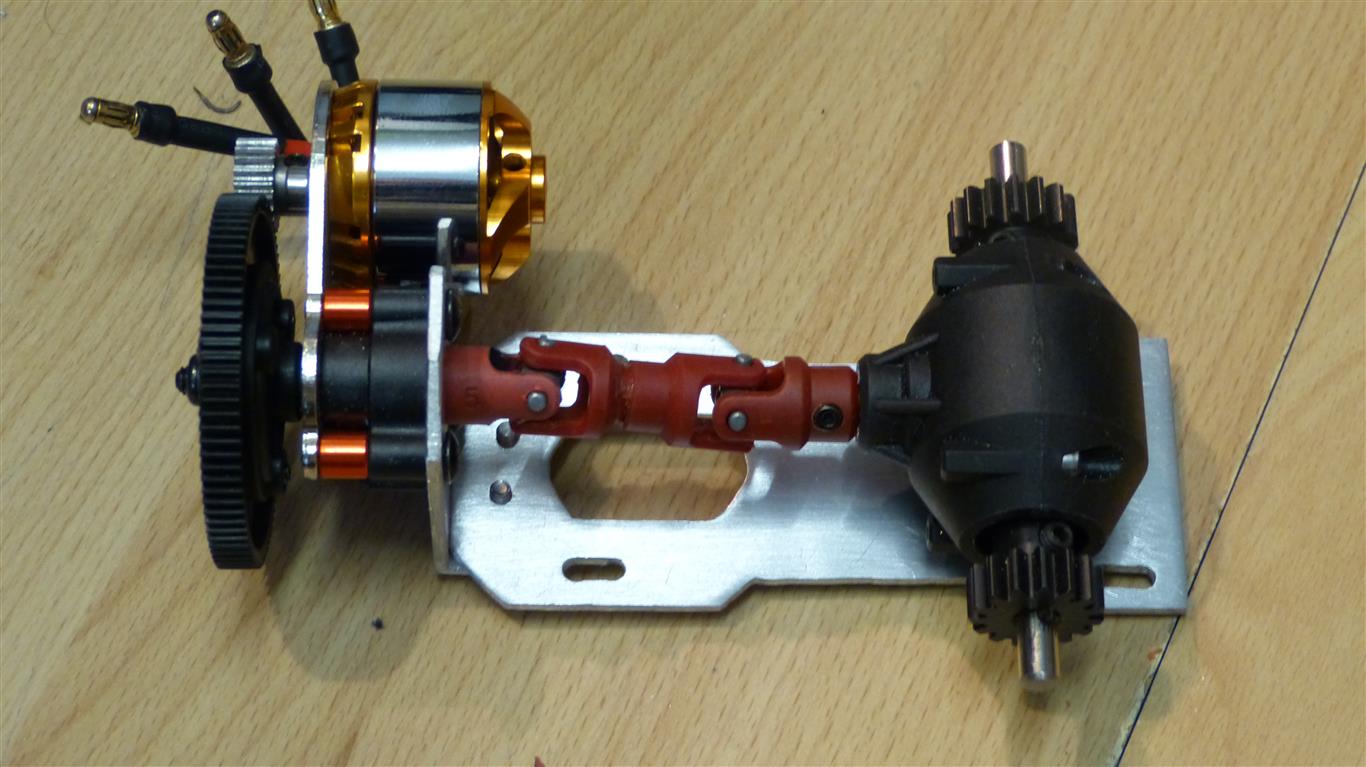
Toen de motor met diff daarop gemonteerd
en het hele spul in de auto en afgesteld. De geprinte steunen kunnen iets op en neer daarvoor, en de montageplaat heen en weer.
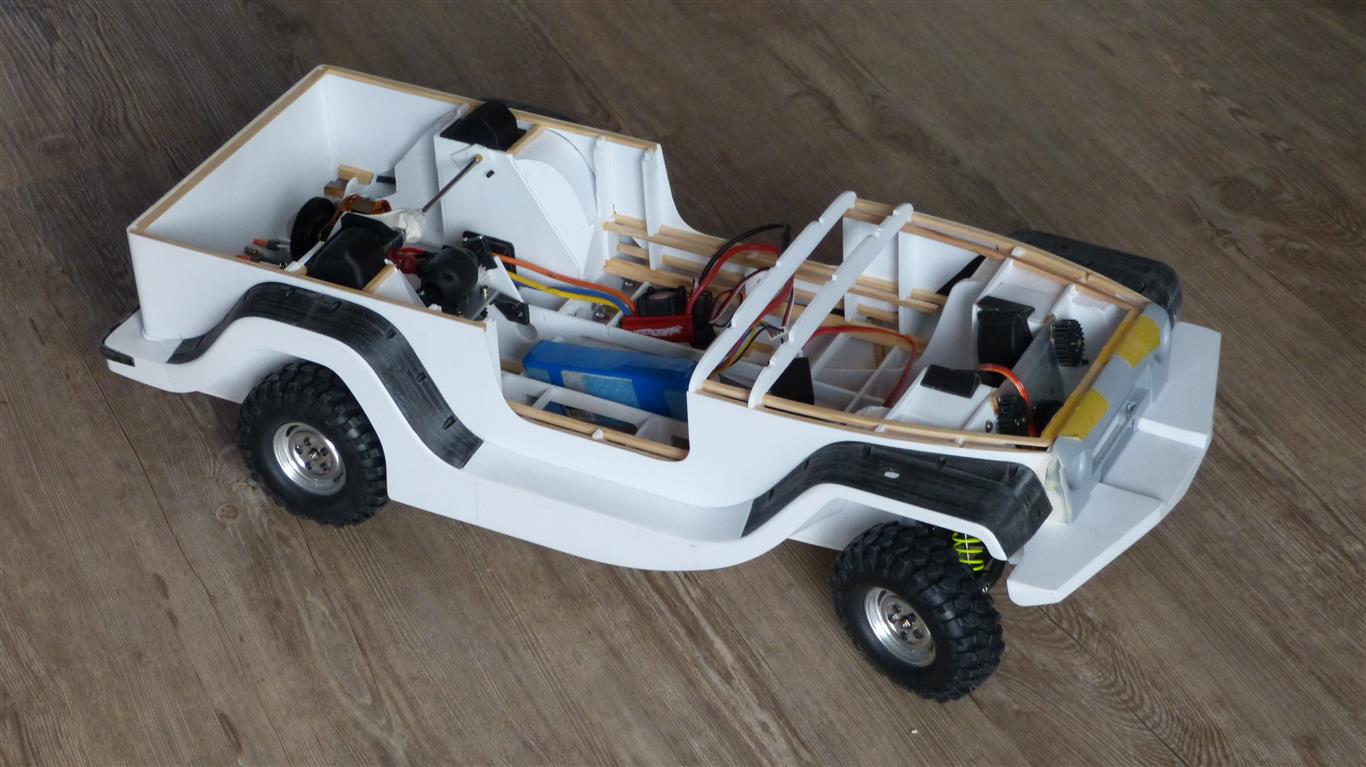
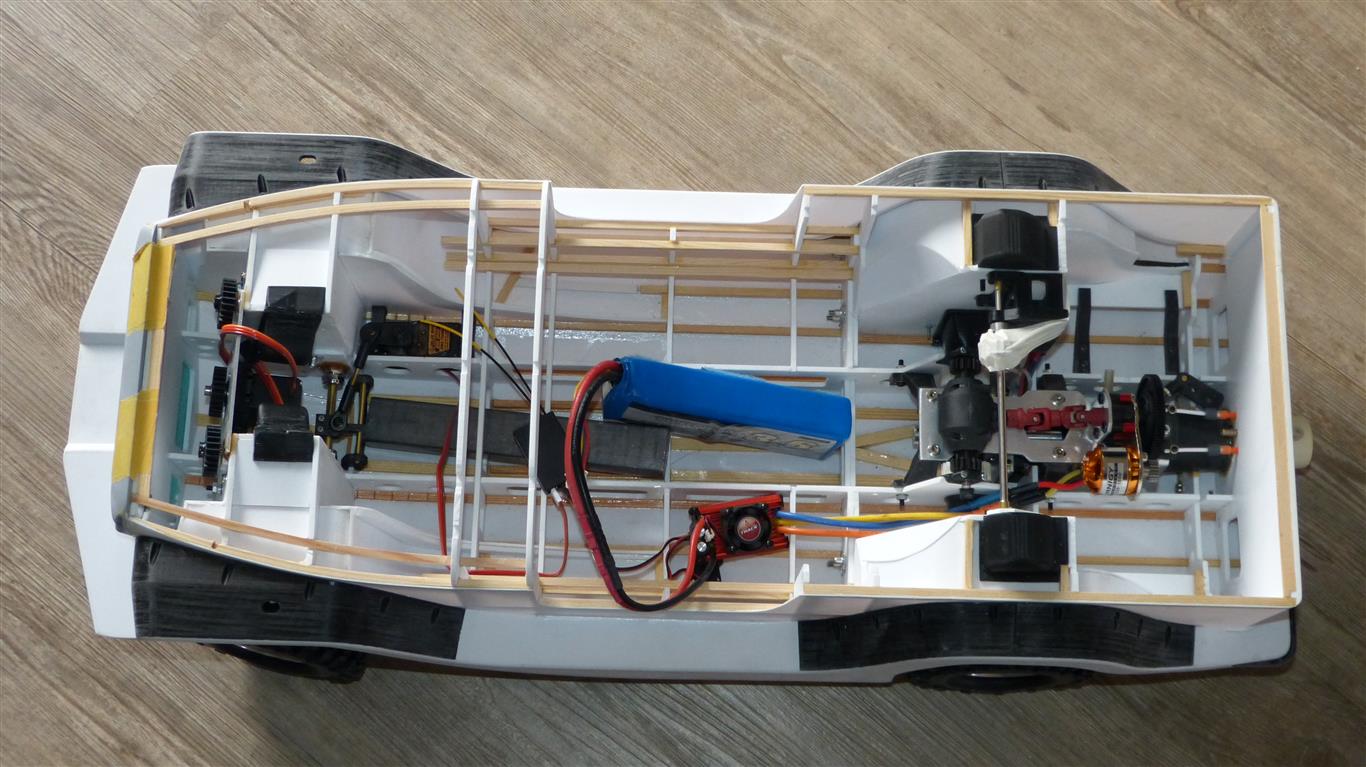
Vervolgens de hele auto weer in elkaar, klaar voor de proefrit:
En dan de proefrit. Met enig zweet in de bilnaad, is toch een spannend moment. En gelukkig deed hij wat hij moest. Sturen gaat prima, de snelheid is ook mooi te regelen. Er komt redelijk wat geluid uit de romp, maar dat is met een lage pitch, en lijkt wat op motorgeluid, stoort niet in ieder geval.
Toen ik echter de camera wou pakken om jullie ook te kunnen laten zien hoe hij rijdt wilde hij plots niet meer lekker accelereren. Een van de tandwielen op de aandrijfassen bleek los te gaan, daar is een opvulbus los geraakt. Om dat te verhelpen moet alleen de hele aandrijving er echter weer uit ... ik heb weer wat te doen vanavond .. Filmpje komt nog, beloofd!
Filmpje komt nog, beloofd!
Hoe dan ook ben ik blij met hoe alle delen tot nu toe nu samen blijken te vallen, en te werken! Spontaan komt bij mij daarbij de kreet van Hanibal Smith naar boven: "I love it when a plan comes together !!"
Eerst de tandwieltreinen links en rechts gemonteerd. Past volgens plan met 1-1,5mm speling met de jet-ourttrunner.
Dan een alu montageplaatje gemaakt die met geprinte steuntjes tegen de hoofdliggers gemonteerd wordt
Toen de motor met diff daarop gemonteerd
en het hele spul in de auto en afgesteld. De geprinte steunen kunnen iets op en neer daarvoor, en de montageplaat heen en weer.
Vervolgens de hele auto weer in elkaar, klaar voor de proefrit:
En dan de proefrit. Met enig zweet in de bilnaad, is toch een spannend moment. En gelukkig deed hij wat hij moest. Sturen gaat prima, de snelheid is ook mooi te regelen. Er komt redelijk wat geluid uit de romp, maar dat is met een lage pitch, en lijkt wat op motorgeluid, stoort niet in ieder geval.
Toen ik echter de camera wou pakken om jullie ook te kunnen laten zien hoe hij rijdt wilde hij plots niet meer lekker accelereren. Een van de tandwielen op de aandrijfassen bleek los te gaan, daar is een opvulbus los geraakt. Om dat te verhelpen moet alleen de hele aandrijving er echter weer uit ... ik heb weer wat te doen vanavond ..
Filmpje komt nog, beloofd!Hoe dan ook ben ik blij met hoe alle delen tot nu toe nu samen blijken te vallen, en te werken! Spontaan komt bij mij daarbij de kreet van Hanibal Smith naar boven: "I love it when a plan comes together !!"
Echt heel mooi ontworpen!
En dat zonder 3D CAD voor het complete model! Daar neem ik mijn pet voor af, prachtig!
Ben erg benieuwd naar de film.
En is dit de eerste auto met een outrunner?
En dat zonder 3D CAD voor het complete model! Daar neem ik mijn pet voor af, prachtig!
Ben erg benieuwd naar de film.
En is dit de eerste auto met een outrunner?
En is dit de eerste auto met een outrunner?
Nee, is al wel eens eerder gedaan. Zo heb ik al eens een 28mm outrunner in een buggy van mijn zoon gezet. Net zoveel power als een snelle 540 motor, minder dan de helft aan gewicht, anderhalf maal zo lang op een accu, en door de gewichtsvermindering (achter de achteras) een veel beter rijdende auto.
Bij de watercar doe ik het hoofdzakelijk om het gewicht en de veel compactere motor.
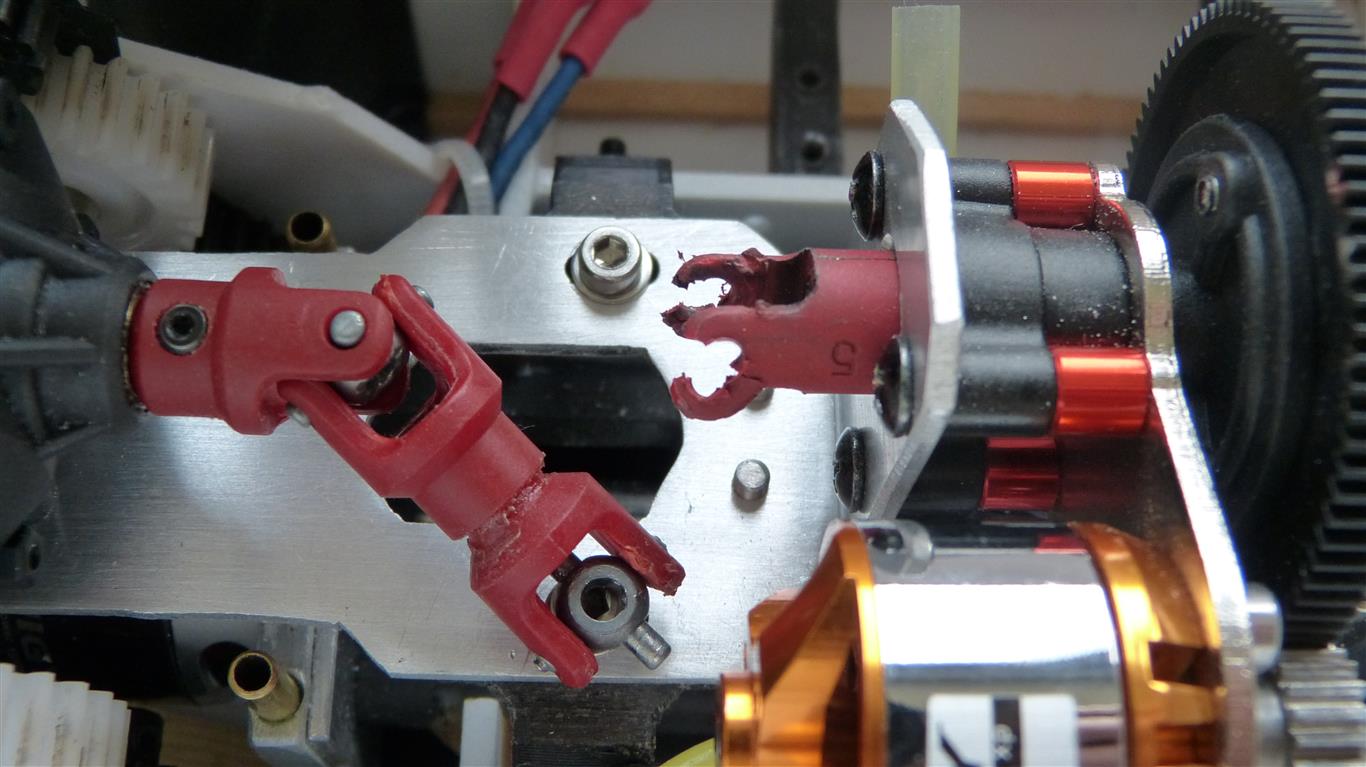
Na de defecte bus aangepast te hebben ging het bij de eerste proefrit daarna weer mis. Eerst liep hij goed, toen plots een hoop geratel:
Ik had dus een oude Graupner koppeling gebruikt die al in meerdere modellen dienst had gedaan, en een jaartje of 20 oud was. Hij kon het nu niet meer aan, het arme ding... Deze dan maar vervangen door een steviger exemplaar, en toen ging alles wel goed. Drie maal scheepsrecht, waarmee dit topic binnen de (speed)boten toch nog legitiem is.
De volgende beelden dan weer niet, staat geen druppel water op:
Het piepen is in werkelijkheid een stuk minder dan op de video. Hoe dan ook is nu het eerste aspect van dit model klaar; hij rijd!! En nog best goed ook vind ik.
En nog best goed ook vind ik.
Ik had dus een oude Graupner koppeling gebruikt die al in meerdere modellen dienst had gedaan, en een jaartje of 20 oud was. Hij kon het nu niet meer aan, het arme ding... Deze dan maar vervangen door een steviger exemplaar, en toen ging alles wel goed. Drie maal scheepsrecht, waarmee dit topic binnen de (speed)boten toch nog legitiem is.
De volgende beelden dan weer niet, staat geen druppel water op:
Het piepen is in werkelijkheid een stuk minder dan op de video. Hoe dan ook is nu het eerste aspect van dit model klaar; hij rijd!!
En nog best goed ook vind ik.
Laatst bewerkt:
eric_laermans
PH-SAM
Ik vind de sound eigenlijk wel erg okay. Ja, een outrunner geeft als extra altijd een hoge piep, zie/ luister de hubmotor-auto waar ik vandaag nog even mee ben scheuren:
Ik vind de snelheid op land meer dan prima! Ook de schokbrekers lijken hun werk prima te doen.Na de defecte bus aangepast te hebben ging het bij de eerste proefrit daarna weer mis. Eerst liep hij goed, toen plots een hoop geratel:
Ik had dus een oude Graupner koppeling gebruikt die al in meerdere modellen dienst had gedaan, en een jaartje of 20 oud was. Hij kom het nu niet meer aan, het arme ding... Deze dan maar vervangen door een steviger exemplaar, en toen ging alles wel goed. Drie maal scheepsrecht, waarmee dit topic binnen de (speed)boten toch nog legitiem is.
De volgende beelden dan weer niet, staat geen druppel water op:
Het piepen is in werkelijkheid een stuk minder dan op de video. Hoe dan ook is nu het eerste aspect van dit model klaar; hij rijd!!
Kortom, deze kant van het model is meer dan geslaagd wat mij betreft
Proficiat!
Ik kijk steeds meer uit naar de natte maiden!
ron van sommeren
Forum veteraan
Ik hoor geen piep Eric, maar dat kan ook aan de 'stoorzenders' hier in huis liggen. Wanneer je een piep hoort, is het geen kwestie van in- of outrunner, het is de regelaar die piept. Je hoort de (geselecteerde) PWM frequentie: 8, 12 of 16kHz. Mocht het geluid storend zijn dan zou je nog 32kHz kunnen selecteren, buiten de gehoorgrens.... Ja, een outrunner geeft als extra altijd een hoge piep ...
Laatst bewerkt:
eric_laermans
PH-SAM
@ron van sommeren hoor je wel het geluid van vleermuizen dan?
ron van sommeren
Forum veteraan
Dat is ultrosoon geluid, boven 20kHz. Dat kan niemand horen.