Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Naze32 icm Multiwii GUI
- Topicstarter swsa13
- Startdatum
@topix ok bedankt heb ik nu ook ik geloof dat ik Rubaaaa verkeerd had begrepen. Moet met 2 omhoog 0.00 wordt 0.20 toch maar nu kan ik niet testen batterij leeg en imax B6 zegt iedere keer connectie error andere 3s lippo geen probleem zomaar ineens dus ik ben genoodzaakt hem aan de chameleon te hangen aan een auto accu alleen geen ballance aansluiting op de lader. Zal toch voor een keer niet uitmaken.
Met 0.02 per keer omhoog totdat ie goed reageerd.
Ik zou op 0.14 beginnen en dan omhoog gaan Tot ie te fel reageerd en dan 1 stap terug
Ik zou op 0.14 beginnen en dan omhoog gaan Tot ie te fel reageerd en dan 1 stap terug
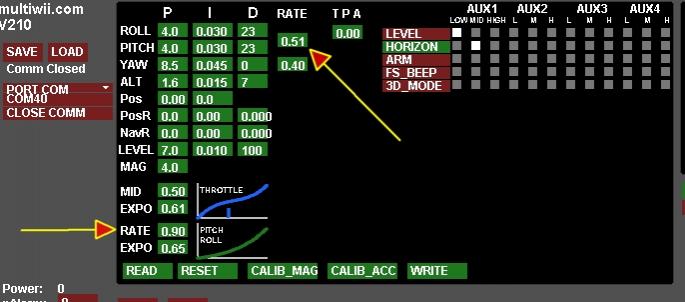
") . 0.4 of 0.5 werkt prima.
. 0.4 of 0.5 werkt prima.Lucbis,
Zie ook Boris zijn stukje en grafiekje over TPA op de Naze wiki: Naze Wiki | Howto / PIDTuning
Zie ook Boris zijn stukje en grafiekje over TPA op de Naze wiki: Naze Wiki | Howto / PIDTuning
markjuhh
Forum veteraan
Heeft weldegelijk invloed op elkaar. Maar dat is is meer voor een ander draadje. Vooral roll pitch rate moet hoger bij een snellere looptime.
OK, verder in het goede topic.
Kan jij eens uitleggen hoe de theorie daarachter zit dan?
Voor zover ik begrepen en geprobeert heb heeft het eigenlijk niks met elkaar te maken.
OK, verder in het goede topic.
Kan jij eens uitleggen hoe de theorie daarachter zit dan?
Voor zover ik begrepen en geprobeert heb heeft het eigenlijk niks met elkaar te maken.
Ik lees nu dat het de RC rate is en niet zoals ik zei de roll pitch rate. Die 2 haal ik altijd door elkaar.
De exacte samenhang van looptime, PID's en RC Rate zijn me nog niet helemaal duidelijk.
De laatste paar dagen ben ik aan het experimenteren met een extreem lage looptime (1600) zoals in de volgende link. RC Groups - View Single Post - Blackout Mini H Quad - 220mm - Carbon Fiber - Built for FPV
Quadcopter hangt hiermee superstabiel in de lucht. Ik ben er echter nog niet over uit of dit het gevolg is van de looptime of van de hoge PID waarden. Die hoge PID waarden zijn denk ik enkel mogelijk door de zeer hoge D waarde.
Keerzijde van deze tuning is dat ik op mijn Quadcopter met BLHeli esc synchronisatieproblemen krijg bij snelle loopings.
Zoals Heyudude ook al opmerkt moet je de RC rate best verhogen om weer dezelfde response van je toestel te krijgen zodra de looptime een stuk lager is.