Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Naze32 icm Multiwii GUI
- Topicstarter swsa13
- Startdatum
 Haastige spoed..
Haastige spoed..Net mijn naze32 acro bordje ontvangen , wat is dit ding klein !
Hoop dat mijn onderdelen snel binnen stromen kan ik mooi beginnen aan mijn rag quadje
İs het misschien mogelijk om mijn huidige dji f550 te gebruiken om de naze32 al vast te gebruiken en leren kennen ? Dus de naza even om wisselen met naze32?
Maakt het wat uit waar de naze32 geplaatst word ? Middenop de quad of ?
Hoop dat mijn onderdelen snel binnen stromen kan ik mooi beginnen aan mijn rag quadje
İs het misschien mogelijk om mijn huidige dji f550 te gebruiken om de naze32 al vast te gebruiken en leren kennen ? Dus de naza even om wisselen met naze32?
Maakt het wat uit waar de naze32 geplaatst word ? Middenop de quad of ?
Yup! Acc hoef je niet te calibreren is mijn ervaring als deze een keer goed geleveled is, maar vlieg eigenlijk nooit atti veel.
Hoi, garbungel
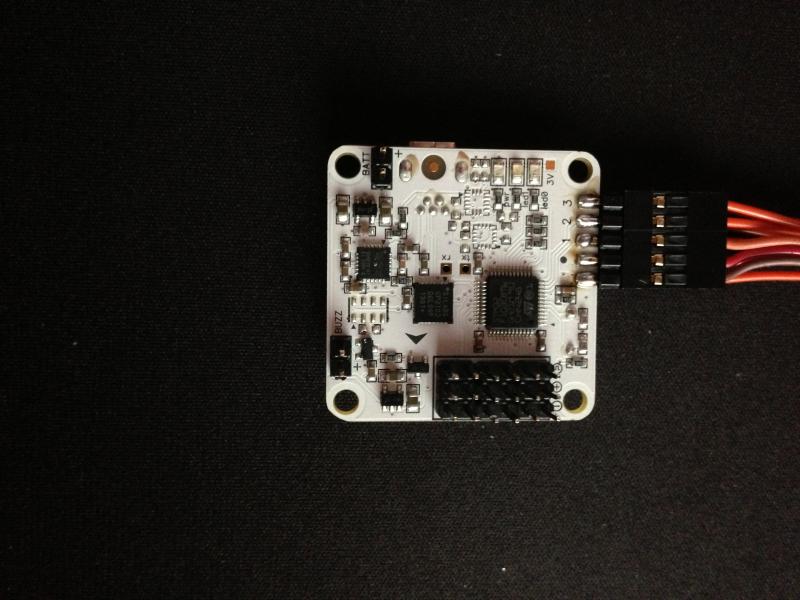
Een vraagje kun je misschien een foto plaatsen hoe de naze32 is verbonden met je ontvanger ?
Ik wil de mijne niet verbranden namelijk
Ik snap het niet via de handleiding namelijk
Mits we de zelfde ontvanger hebben natuurlijk,
Ik heb een mx-16 met Gr.-16 ontvanger
Misschien dat iemand anders ook een foto kan plaatsen als garbungel een andere ontvanger gebruikt
Hoi, markjuhh
ik heb hem gesoldeerd en vraag me af hoe de naze32 aanzijn voeding komt
via de esc's of moet ik die apart voeden ?
ik heb hem gesoldeerd en vraag me af hoe de naze32 aanzijn voeding komt
via de esc's of moet ik die apart voeden ?


hoi, ik heb eindelijk alles gesoldeerd, en motoren bevestigt ,
alleen een vraagje,
mag de accu en usb poort tegelijk aangesloten worden op de pc ?
want met alleen de usb poort, kan ik de naze32 wel uitlezen, maar dan brand lampje van mijn ontvanger niet gr-16
sluit ik alleen de accu op dan werkt wel mijn gr-16 en de naze32, maar dan kan ik hem niet uitlezen
dus de vraag is kan ik beiden tegelijk aansluiten zonder dat er iets naar de knopen gaat ?
alleen een vraagje,
mag de accu en usb poort tegelijk aangesloten worden op de pc ?
want met alleen de usb poort, kan ik de naze32 wel uitlezen, maar dan brand lampje van mijn ontvanger niet gr-16
sluit ik alleen de accu op dan werkt wel mijn gr-16 en de naze32, maar dan kan ik hem niet uitlezen
dus de vraag is kan ik beiden tegelijk aansluiten zonder dat er iets naar de knopen gaat ?
yup je kan beide aansluiten.
Met alleen USB kun je nooit ontvanger informatie zien en instellen.
merci ff testen dan maar
Vandaag eerste vluchtjes gedaan in de achtertuin. Mijn opmerkingen met standaardinstellingen:
1: Rate lijkt me erg stabiel
2: ACC kan iets beter, daar vind ik de CC3D meer een rem als je de stick loslaat. Maar de CC3D is wel al enige tijd in gebruik en dus ook getuned.
3: Horizon lijkt me de weaklevel van OP, maar ik merk weinig verschil tussen level en horizon.
4: Baro werkt wel maar zelfde probleem als vele andere, meer dan 1m schommelen. Dat doet NAZA stukken beter. Hier enkel wat mouse rond de baro, de NAZA heeft natuurlijk nog een huisje.
5: lekker lang vliegen met rachel frame, weegt erg weinig en met een 2100mAh gaat hij wel erg lang. Zal volgende vluchten eens exact meten maar schat 14 min. TOW 650g.
6: Ben niet meer gewoon dat je de gyro moet calibreren met een commando voor de vlucht, even wennen. Heeft zo zijn voor- en nadelen.
1: Rate lijkt me erg stabiel
2: ACC kan iets beter, daar vind ik de CC3D meer een rem als je de stick loslaat. Maar de CC3D is wel al enige tijd in gebruik en dus ook getuned.
3: Horizon lijkt me de weaklevel van OP, maar ik merk weinig verschil tussen level en horizon.
4: Baro werkt wel maar zelfde probleem als vele andere, meer dan 1m schommelen. Dat doet NAZA stukken beter. Hier enkel wat mouse rond de baro, de NAZA heeft natuurlijk nog een huisje.
5: lekker lang vliegen met rachel frame, weegt erg weinig en met een 2100mAh gaat hij wel erg lang. Zal volgende vluchten eens exact meten maar schat 14 min. TOW 650g.
6: Ben niet meer gewoon dat je de gyro moet calibreren met een commando voor de vlucht, even wennen. Heeft zo zijn voor- en nadelen.
BorisB
Forum veteraan
je moet voor ACC volgende doen en laat maar weten wat je er dan van vindt.
set looptime = 3000
set acc_lpf_factor = 100
Vind het vele malen beter dan bij CC3D en ZEKER de rate! Die is niet te houden. Geen overshoots bij flips rolls en zeer stabiel vooral in de wind, waar CC3D snel hikjes begint te vertonen en drifting.
set looptime = 3000
set acc_lpf_factor = 100
Vind het vele malen beter dan bij CC3D en ZEKER de rate! Die is niet te houden. Geen overshoots bij flips rolls en zeer stabiel vooral in de wind, waar CC3D snel hikjes begint te vertonen en drifting.
BorisB
Forum veteraan
Heb je endpoints in je TX/RX goed ingesteld? En hoe probeer je te armen? Via stick command of een aparte kanaal?Krijg de mijne niet gearmd ? iemand een idee ?
je moet voor ACC volgende doen en laat maar weten wat je er dan van vindt.
set looptime = 3000
set acc_lpf_factor = 100
Vind het vele malen beter dan bij CC3D en ZEKER de rate! Die is niet te houden. Geen overshoots bij flips rolls en zeer stabiel vooral in de wind, waar CC3D snel hikjes begint te vertonen en drifting.
Stond al zo, had ik van je vorige post gelezen. Is niet slecht hoor, maar kan beter. Ik kan hem bij hoveren met een kleine stickbeweging wat kantelen en dan drift hij zo verder. Dat wordt wat afregelen.
Je weet dat ik geen goede rate vlieger ban, ik kan al in mijn tuin ermee vliegen en dat is al een hele vooruitgang. Maar zeker LOS is het me lastig als de kopter wat verder hangt. Wat die hikjes betreft heb je gelijk, een OP doet dat soms. Stoort niet echt behalve bij FPV.
BorisB
Forum veteraan
Heb dat driften niet ervaren. ACC ook netjes gecalibreerd neem ik aan? Deze moet eenmalig geleveld goed gebeuren als je dat nog niet wist?Stond al zo, had ik van je vorige post gelezen. Is niet slecht hoor, maar kan beter. Ik kan hem bij hoveren met een kleine stickbeweging wat kantelen en dan drift hij zo verder. Dat wordt wat afregelen.
Je weet dat ik geen goede rate vlieger ban, ik kan al in mijn tuin ermee vliegen en dat is al een hele vooruitgang. Maar zeker LOS is het me lastig als de kopter wat verder hangt. Wat die hikjes betreft heb je gelijk, een OP doet dat soms. Stoort niet echt behalve bij FPV.
Manual gyro calibratie vind ik geweldig. Ik bepaal wanneer het gebeurt
.Ik vond dat je goed rate vloog in Antwerpen
. Ik zag geen verschil met atti toen. Het is meer gewenning denk ik. Als je veel atti vliegt is wennen in rate lastiger en andersom.Ja, maar throttle moet dan 0 zijn om te kunnen armen! Als je throttle endpoints niet goed ingesteld zijn, dan wil die dus nier armenendpoints ?
via aparte kanaal zie ook dat ie arm rood word
maar doet niks,
zal hem in die endpoints zijn
zie ook in jou plaatje, dat jij horizon en angel hebt aangevinkt, wat houd dat precies in ?
")