jongens....regenerative braking komt vanuit de regeleaar en heeft niets met cleanflight of welke dan ook fc software te maken[emoji23]
die wist ik wel hoor

Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
jongens....regenerative braking komt vanuit de regeleaar en heeft niets met cleanflight of welke dan ook fc software te maken[emoji23]

alle pid waardes bij alle pid controllers zijn default hetzelfde.Kan iemand mij dan iniedergeval de default Pid settings van pidcontroller 1 vertellen? heb het board zelfs al geset maar de pid waardes blijven het zelfde
alle pid waardes bij alle pid controllers zijn default hetzelfde.
Default waardes zijn ook meestal op lagere power setups goed.

jongens....regenerative braking komt vanuit de regeleaar en heeft niets met cleanflight of welke dan ook fc software te maken[emoji23]
nee die 2 moet je van elkaar los trekken. zijn totaal 2 andere zaken [emoji1]En regenerative braking staat altijd automatisch aan wanneer je oneshot125 gebruikt met kiss escs?
nee die 2 moet je van elkaar los trekken. zijn totaal 2 andere zaken [emoji1]
Ben op dit moment mijn eerste FPV machine aan het bouwen, de Blackout B330. Sinds het idee in mijn hoofd speelt, ben ik ook dit topic aan het volgen. In eerste instantie wilde ik met Baseflight beginnen. Toch spreken de functies van Cleanflight me wel aan. Vlieg trouwens met een Naze32 acro met Cobra 2208/2000kv en ZTW 20A ESC's.
Ondanks het volgen van dit topic blijven sommige zaken echt abracadabra voor me. Ik vind wel wat docs op de github site van Cleanflight, maar wat voor effect ze daadwerkelijk hebben op de vliegeigenschappen is me soms een raadsel. Of is het een kwestie van gewoon doen en je zult er achter komen..
Welk advies hebben jullie voor de eerste vlucht met Cleanflight?
Is er een soort stappenplan welke instellingen eerst te wijzigen voor weer andere? Of Autotune gebruiken? Voor Autotune moet hij toch eerst wel redelijk stabiel kunnen vliegen/hooveren toch? Of werkt dat al goed bij de basisinstellingen?
In het bouwverslag van BorisB over de B330 staan wat PID instellingen. BorisB gaf al aan dat die goed genoeg zijn om redelijk vloeiend met Baseflight te kunnen vliegen. Maar volgens mij gaat dat met Cleanflight niet op als ik het goed begrijp. Baseflight instellingen werken niet in Cleanflight?
Ik wilde mezelf in het diepe gooien met al deze software, maar heb begint nu wel heel diep te worden!
 De default P-waarde is 9 en ik mijn Flip FPV stabiel vliegen op 3.5 P waarde van LEVEL. Verder ben ik ook nog een beginner en kan ik je niet verder helpen
De default P-waarde is 9 en ik mijn Flip FPV stabiel vliegen op 3.5 P waarde van LEVEL. Verder ben ik ook nog een beginner en kan ik je niet verder helpen") Hoop dat je er je voordeel mee kan doen! Hier heb ik ook wel veel aan gehad met instellen: Naze32 - Cleanflight - Seafurymike
Hoop dat je er je voordeel mee kan doen! Hier heb ik ook wel veel aan gehad met instellen: Naze32 - Cleanflight - SeafurymikeBen op dit moment mijn eerste FPV machine aan het bouwen, de Blackout B330. Sinds het idee in mijn hoofd speelt, ben ik ook dit topic aan het volgen. In eerste instantie wilde ik met Baseflight beginnen. Toch spreken de functies van Cleanflight me wel aan. Vlieg trouwens met een Naze32 acro met Cobra 2208/2000kv en ZTW 20A ESC's.
Ondanks het volgen van dit topic blijven sommige zaken echt abracadabra voor me. Ik vind wel wat docs op de github site van Cleanflight, maar wat voor effect ze daadwerkelijk hebben op de vliegeigenschappen is me soms een raadsel. Of is het een kwestie van gewoon doen en je zult er achter komen..
Welk advies hebben jullie voor de eerste vlucht met Cleanflight?
Is er een soort stappenplan welke instellingen eerst te wijzigen voor weer andere? Of Autotune gebruiken? Voor Autotune moet hij toch eerst wel redelijk stabiel kunnen vliegen/hooveren toch? Of werkt dat al goed bij de basisinstellingen?
In het bouwverslag van BorisB over de B330 staan wat PID instellingen. BorisB gaf al aan dat die goed genoeg zijn om redelijk vloeiend met Baseflight te kunnen vliegen. Maar volgens mij gaat dat met Cleanflight niet op als ik het goed begrijp. Baseflight instellingen werken niet in Cleanflight?
Ik wilde mezelf in het diepe gooien met al deze software, maar heb begint nu wel heel diep te worden!
") 7 lipo's alleen maar kloten met de PIDs. Heb zo'n beetje alle mogelijke combinaties PID van yaw getest en de drift blijft, ook bij luxfloat. M'n tx midpoints en endpoints zijn goed en ik gebruik 1.7.2 versie van cleanflight.....
7 lipo's alleen maar kloten met de PIDs. Heb zo'n beetje alle mogelijke combinaties PID van yaw getest en de drift blijft, ook bij luxfloat. M'n tx midpoints en endpoints zijn goed en ik gebruik 1.7.2 versie van cleanflight..... 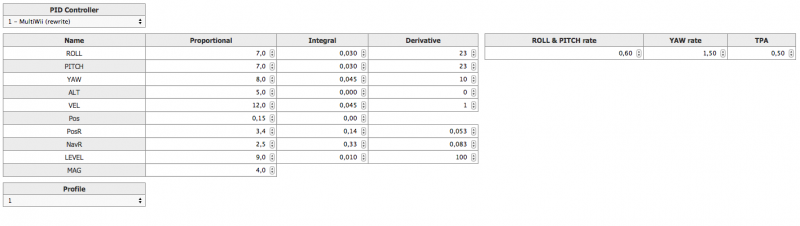
Alleen deze info ben ik alweer mee geholpen. Op zich snap ik dat niet elke vraag beantwoord wordt. De meeste bezoekers zitten natuurlijk niet alleen in dit topic. Alle vragen beantwoorden is soms onbegonnen werk. En voor de gasten die er wat vanaf weten soms ook irritant, wetende dat de vragen misschien al vaker beantwoord zijn. Van de andere kant zijn die antwoorden vaak moeilijk terug te vinden. Ach ja, vind het ook niet erg om zelf alles uit te zoeken, maar vind het ook onzinnig als vragen misschien snel beantwoord zijn.Ik weet precies wat je door maakt en ik ben bang dat je het echt zelf moet ondervinden. Zoals je ziet heb ik ook al verschillende beginners vragen gesteld maar er wordt niet echt op geantwoord heb ik het idee. Enige onder vinding die ik heb gedaan met de instellingen in Cleanflight is dat hij het meest stabiel is in Flightmode 1. Ook schijnt hij dan als je de P waardes veranderd niet de andere waardes ook te veranderen ofzo. Wel erg oppassen want bij mij waren de LEVEL waardes veel ste hoog! De multicopter was totaal onbestuurbaar en het heeft mij 3 props en een beschadigde motor gekost voor ik dit door had..
Hier ga ik mee aan de gang, bedankt!Ben zelf zeker geen expert. Maar als ik jou was zou ik gewoon beginnen met de standaard PID waardes. Cleanflight. PID controller 1. Roll en pitch rate laag (0,40) Yaw rate op 1 en TPA op 0.5.
Vervolgens de P waardes van je ROLL PITCH en YAW verhogen totdat je trillingen ervaart. Als je de P waardes hebt zoals je wilt, kan je gaan klooien met de I's. Daarna de D's.
Als je het vliegen onder de knie hebt kan je je Roll en pitch rate telkens iets verhogen. Je quad reageert dan sneller en sneller.
Je moet gewoon veel uitproberen en dan kom je er vanzelf achter.
Zojuist m'n ztw spider esc's van blheli blueseries voorzien via usb turnigy linker; die ooit gekocht voor een 'superbrain' esc en blij dat ik 'm nog had.Kan je die gewoon via de servo wires flashen? In lees enge verhalen over beperken van de current tijdens flashen enzo..
 Idem eerste keer eeprom write error, nog eens flashen en dan 'successfully'. Ook de config tool werkt gewoon via usb/servokabel.
Idem eerste keer eeprom write error, nog eens flashen en dan 'successfully'. Ook de config tool werkt gewoon via usb/servokabel.Niemand waarvan ik hem kan lenen??Kan ik van iemand een atmel atmega flashing tool lenen voor 1 dag moet 4 regelaren opnieuw flashen ik betaal de verzendkosten plus een beloning van 10 Euro dus je verstuurt hem ik flash me regelaren en verstuur hem weer terug.
want hij is overal uitverkocht behalve bij internationale warehouse maar daar duurt het te lang. zit namelijk verkeerde firmware op me regelen waardoor ik er nu niet goed mee kan vliegen

Graupner E-props zijn perfect maar HQ-props zijn identiek en goedkoper. 1:1 replica alleen is het materiaal iets anders. Ik heb een tijdje de 10x5 van graupner maar ook de HQ gebruikt. Ik heb de afgelopen dagen geknoeid met allerhande PID controllers. 1 2 en 5. Ik had wat vreemde neven effecten dus ben ik gaan spelen met die controllers. Op 5 heb je evt. Nog de mogelijkheid tot level flight, dus de Acceleratiesensor aan. Ik heb hem op een schakelaar alleen gebruik het niet. De ervaringen van bijv. BorisB zijn nu ook erg goed met PID 5 ( Harakiri) sinds de laatste update. Op welke PID controller de auto functie draait weet ik niet, ik gebruikte hem op 5. Werkt prima alleen kwam hij vrij hoog op de P. Autotune als indicatie is niet nodig hoe zaligmakend het ook klinkt. Je merkt direct of je op het goede pad bezig bent of niet. Je multi vliegt op alle settings eigenlijk al wel OK. Doet hij dat totaal niet dan even verder zoeken.Esc's zijn gethrottle ranged.
props zijn niet gebalanceerd als ik de goede heb gevonden wil ik Graupner E-props er op gooien.
Ik neem aan dat de LEVEL pid's dan omlaag moet zetten? Ook vraag ik mij af welke PID controller ik het best kan gebruiken? ik gebruik nu 0. Als ik hem op een ander zet krijg ik ineens hele andere waardes (veel hoger) ik las ook dat de auto tune functie niet op pid controller 2 werkt?
Vandaag voor het eerst mn flip260 gevlogen nadat ik 'm heb ge-upgrade met Kiss18a oneshot125, cleanflight en pid1
Wel 2 probleempjes. Na yawen drift de yaw een beetje door. En als de neus naar beneden staat en ik pitch naar achter, dan schiet ie soms te ver door naar achter.
Welke PID's zouden jullie aanpassen, en hoe, om dit te verhelpen? Heb PID tunen nog steeds niet in de vingers.
Wow! Nice flying en helemaal de landing! Sweet! Standing up no less. Ik dacht dat alleen Boris dat kon
 .
. Wellicht de gains eens wat drastischer aanpassen? I bijvoorbeeld lekker hoog. (oops, ik hoop niet dat ik nu de experts op mijn dak krijg) Gains drastisch veranderen om te kijken of dit het probleem verergert of juist vermindert. Dna wete je gauw genoeg of het “op te lossen is” met de gains.Wat een heerlijke dag!! Zwaar genoten op de hei met de Hoverships en een paar vrienden. Nadat ik mijn newbie error had verbeterd (end points zender niet ingesteld, maar alleen centre) kon ik ook weer disarmen zonder throttle... Eigenlijk een kwestie van nadenken. Nu alle channels netjes dicthbij de 1000-2000 en de ESC's opnieuw ingeleerd. Nieuwe props erop en gaan met die banaan. Dank voor alle hulp en tips die jullie allemaal geven!
Maar, nu ik inmiddels wat sneller durf te gaan, schijn ik ook last te krijgen van het "pitch up" probleem. Te weten: Als ik hard vooruit ga en om wil draaien voor een bocht (elevator naar achteren, aileron naar links en yaw naar links, gas erop) dan schiet de quad ineens achterover tijdens het naar achteren trekken (elevator) en duurt het even voordat ik hem weer "te pakken" krijg. Ik heb geprobeerd de I te verlagen van 25 naar 15, probleem bleef bestaan, minder erg, maar wel vaker. Ik heb de I teruggezet op 25 en de D x 1,5 gedaan. Nu wordt het pitch up minder, maar heb ik bibbers bij opstijgen. Nog geen TPA ingesteld. Imho zou dit niet perse nodig moeten zijn bij een goede setup... iemand een mening? Hoe meer ik er van denk te begrijpen, hoe minder ik lijk te weten... Oh wat een heerlijke hobby!
Verder heb ik inmiddels ledstrip.c aangepast zodat de throttle leds een (voor mij) betere kleur hebben en krijgen. Basiskleur is groen, nu met low throttle blauw, mid throttle groen, en high throttle oranje en max rood. Zonder aanpassing was het omgekeerd en het kleurbereik niet groot genoeg naar mijn mening.
Heb nog wel een andere issue met de ledstrip waarvan ik een bug vermoed, maar misschien doe ik iets verkeerd nog... Flight mode noord gaat niet aan.. de rest wel... Iemand hier ervaringen mee?
Zover weer de update... Keep flying!
Het geen ik er van merkte was het volgende:Eerlijk gezegd, merk ik ook weinig verschil. Ik gooi het op onkunde mijnderzijnds en slechte PID's. Wat ik terugzie in filmpjes is toch echt wel een stapje beter te noemen tov niet oneshot. Ik denk dat dan alles moet kloppen.
Voor zover ik kan zien, heb je oneshot aan. Wat je via CLI nog kan doen, is de looptime aanpassen (if not already). Op die manier maak je beter gebruik van de mogelijkheden van oneshot. Standaard is 3500 ofzo, met oneshot kan je lager, wat resulteert in een snellere update... Hierdoor kan je weer hogere PID's hebben etc etc. Ik ben ook geen expert, maar dit is wat ik weet.
En geen idee, misschien als waarschuwing dat je de oude (niet oneshots) eraf haalt?
Gewoon voor PID 5 gaan, dat werkte bij mij het beste? Da’s voor iedereen verschillend natuurlijk maar na alle verhalen moet het wel juist zijn...Kan iemand mij dan iniedergeval de default Pid settings van pidcontroller 1 vertellen? heb het board zelfs al geset maar de pid waardes blijven het zelfde
Geen ervaring met Kiss. In Blheli suit zet ik de “damped lite” aan wat regenerative breaking is.En regenerative braking staat altijd automatisch aan wanneer je oneshot125 gebruikt met kiss escs?
Leuk! Die setup zal wel knallen. Zo stond er laatste een video op youtube van iemand die met dezelfde setup 174 km/u vloog? Idioot..Ben op dit moment mijn eerste FPV machine aan het bouwen, de Blackout B330. Sinds het idee in mijn hoofd speelt, ben ik ook dit topic aan het volgen. In eerste instantie wilde ik met Baseflight beginnen. Toch spreken de functies van Cleanflight me wel aan. Vlieg trouwens met een Naze32 acro met Cobra 2208/2000kv en ZTW 20A ESC's.
Ondanks het volgen van dit topic blijven sommige zaken echt abracadabra voor me. Ik vind wel wat docs op de github site van Cleanflight, maar wat voor effect ze daadwerkelijk hebben op de vliegeigenschappen is me soms een raadsel. Of is het een kwestie van gewoon doen en je zult er achter komen..
Welk advies hebben jullie voor de eerste vlucht met Cleanflight?
Is er een soort stappenplan welke instellingen eerst te wijzigen voor weer andere? Of Autotune gebruiken? Voor Autotune moet hij toch eerst wel redelijk stabiel kunnen vliegen/hooveren toch? Of werkt dat al goed bij de basisinstellingen?
In het bouwverslag van BorisB over de B330 staan wat PID instellingen. BorisB gaf al aan dat die goed genoeg zijn om redelijk vloeiend met Baseflight te kunnen vliegen. Maar volgens mij gaat dat met Cleanflight niet op als ik het goed begrijp. Baseflight instellingen werken niet in Cleanflight?
Ik wilde mezelf in het diepe gooien met al deze software, maar heb begint nu wel heel diep te worden!
Level op een switch zetten, altijd....Ook om jezelf vertrouwd te maken met het verschillen tussen gyro of gyro+acc ( acro of level)Ik weet precies wat je door maakt en ik ben bang dat je het echt zelf moet ondervinden. Zoals je ziet heb ik ook al verschillende beginners vragen gesteld maar er wordt niet echt op geantwoord heb ik het idee. Enige onder vinding die ik heb gedaan met de instellingen in Cleanflight is dat hij het meest stabiel is in Flightmode 1. Ook schijnt hij dan als je de P waardes veranderd niet de andere waardes ook te veranderen ofzo. Wel erg oppassen want bij mij waren de LEVEL waardes veel ste hoog! De multicopter was totaal onbestuurbaar en het heeft mij 3 props en een beschadigde motor gekost voor ik dit door had..
 vandaag ook aan het stoeien geweest en moest de LEVEL drastische omlaag gooien om hem stabiel te krijgen. Hij vliegt nu aardig.
vandaag ook aan het stoeien geweest en moest de LEVEL drastische omlaag gooien om hem stabiel te krijgen. Hij vliegt nu aardig.