Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Bouwverslag Brewster 339D Buffalo in schaal 1:5
- Topicstarter Bart83
- Startdatum
Hier is het bijgewerkte schema versie 2 met twee kleine veranderingen: a) toevoegen NO en NC tekst bij micro-schakelaars, en b) +5V is middelste servodraad gemaakt:

Hopelijk is het zo goed.
Wat me trouwens opvalt is dat er TWEE driver IC's op het L298N 5AD board in een DIP8 package zitten? Een L298N lijkt "normaal" in een ENKELE MultiWat15 of PowerSO20 te zitten (volgens ST datasheet) ...
Clear skies and happy landings,
Jurgen
Hopelijk is het zo goed.
Wat me trouwens opvalt is dat er TWEE driver IC's op het L298N 5AD board in een DIP8 package zitten? Een L298N lijkt "normaal" in een ENKELE MultiWat15 of PowerSO20 te zitten (volgens ST datasheet) ...
Clear skies and happy landings,
Jurgen
Laatst bewerkt:
Bart83
verslagschrijvers
Ontzettend bedankt voor het meedenken allemaal ")
1 : De motor draden vanuit het servo PCB geven bij niet bedienen beide - . als de schakelaar op de zender wordt bediend dan staat er op één van de draden 5v. L298N word dus door 5v bediend)
2: ik heb geen idee waar deze aansluiting voor is en kan hier helaas niet over vinden . . . .
3: ik begrijp de vraag niet helemaal
Mvg,
Bart
1) in de tabel staat "1/PWM" om de motor "speed regulated" te laten draaien (duty cycle van het PWM signaal zal de draaisnelheid van de motor bepalen, neem ik even aan). Werkt het ook als "1/PWM" = 1, oftwel met op D0 of D1 ingang een constante spanning van 5V? Geeft dit dan de grootste draaisnelheid van de motor?
2) dient op het L298N AD board niet ook VT aangesloten te worden? Ik bedoel: als ik naar het schema van het L298N IC kijk zijn er "enable" signalen die wel "hoog" dienen te zijn om de motor te laten draaien.
3) zou een omschakeling van 5V op D1 (of D0) via micro-switch S1 (of S0) naar het "1/PWM" signaal M1 (of M0) dat uit het servo board komt een vervelende sprong in draaisnelheid van de motor geven?
1 : De motor draden vanuit het servo PCB geven bij niet bedienen beide - . als de schakelaar op de zender wordt bediend dan staat er op één van de draden 5v. L298N word dus door 5v bediend)
2: ik heb geen idee waar deze aansluiting voor is en kan hier helaas niet over vinden . . . .
3: ik begrijp de vraag niet helemaal
Mvg,
Bart
Bart83
verslagschrijvers
Maar wat nou met de 3,3 V? Als je er een 3,3 V spanningsregelaar op hebt zitten mag je de poorten niet met een hogere spanning belasten, tenminste niet zonder beveiliging, bijvoorbeeld met schottky diodes.
Dit kan tot 6v . . .
3.Parameters:
1>.Product Name:5A Dual Motor Drive Module
2>.Product Number:ZK-5AD
3>.Working Voltage DC 3.0V-14V
4>.Input Signal Voltage DC 2.2V-6.0V
5>.Drive Current:5A
6>.Stand-by Current:10uA
7>.Working Temperature range:-20~85 Celsuis
8>.Working Humidity range:0%-95%RH
9>.Size:38*27*18mm
10>.Mounting hole diameter:2mm
Mvg,
Bart
De TA6586 lijkt een single motor driver IC te zijn van het Chinese Wuxi Ruizhi (RZ) Microelectronics Co., Ltd., zie applicatie schema hieronder:


Daarom zitten TWEE van deze TA6586 IC's in DIP8 (through hole, dual in line 2x4 pins) behuizing op het "L298N 5AD board" om van het bord een DUAL motor driver te maken. Het is een beetje raar dat het bord nog L298N in de naam heeft, terwijl TA6586 IC's op het bord zitten. Overigens, er zou maar ÉÉN L298N nodig zijn geweest om een DUAL motor driver te maken.
De TA6585 heeft een "thermal shutdown" die aangesproken wordt bij typisch 130oC. Dit is wel iets om rekening mee te houden, want als deze temperatuur wordt bereikt houdt het IC er tijdelijk mee op en dat is niet altijd gewenst: het landingsgestel zit dan misschien halverwege "vast". Het IC zal weer gaan werken als de temperatuur tot beneden de 130oC is afgekoeld (hopelijk voordat de vliegaccu's leeg zijn!). Om dit "vast-lopen" te voorkomen is misschien een koellichaampje nodig, praktijktest bij hoge (IC!) omgevingstemperatuur en vooral bij wat meer motorweerstand (smering van de spindle!) zal moeten uitwijzen of extra koeling nodig is.
Volgens TA6586 datasheet is de operationele range voor voedingsspanning Vcc minimaal 3V en maximaal 14V. De "absolute maximum rating" voor Vcc is 15V. Heel waarschijnlijk kunnen de INF en INR ingangen deze spanning ook aan, maar ik zou willen aanbevelen om de spanning op deze ingangen tot 5V te beperken. En dat kan ook omdat het servo bord geen hogere stuurspanning dan 5V zal uitgeven.
De 3V3 voedingsspanning lijkt toch een spanning te zijn die op het L298N 5AD bord wordt gemaakt via een lineaire spanningsregelaar (IC in SOT23 behuizing tussen de elco's in). Er staat een pijltje naar buiten toe gericht in witte "silk screen" op de PCB, een teken dat het niet persé voor de TA6568 zelf wordt gebruikt (maar dat is niet zeker te zeggen zonder naar de layout te kijken). Het TA6568 IC lijkt rechtstreeks te (kunnen) worden gevoed vanuit de 3s LiPo (11.1V - 12.6V, dus ruim beneden 15V).
Nu zal ik het draadje niet verder "vervuilen"") , ik heb hopelijk zinvol bijgedragen aan de motorsturing voor het landingsgestel van de Brewster Buffalo.
, ik heb hopelijk zinvol bijgedragen aan de motorsturing voor het landingsgestel van de Brewster Buffalo.
Clear skies and many happy landings,
Jurgen
Daarom zitten TWEE van deze TA6586 IC's in DIP8 (through hole, dual in line 2x4 pins) behuizing op het "L298N 5AD board" om van het bord een DUAL motor driver te maken. Het is een beetje raar dat het bord nog L298N in de naam heeft, terwijl TA6586 IC's op het bord zitten. Overigens, er zou maar ÉÉN L298N nodig zijn geweest om een DUAL motor driver te maken.
De TA6585 heeft een "thermal shutdown" die aangesproken wordt bij typisch 130oC. Dit is wel iets om rekening mee te houden, want als deze temperatuur wordt bereikt houdt het IC er tijdelijk mee op en dat is niet altijd gewenst: het landingsgestel zit dan misschien halverwege "vast". Het IC zal weer gaan werken als de temperatuur tot beneden de 130oC is afgekoeld (hopelijk voordat de vliegaccu's leeg zijn!). Om dit "vast-lopen" te voorkomen is misschien een koellichaampje nodig, praktijktest bij hoge (IC!) omgevingstemperatuur en vooral bij wat meer motorweerstand (smering van de spindle!) zal moeten uitwijzen of extra koeling nodig is.
Volgens TA6586 datasheet is de operationele range voor voedingsspanning Vcc minimaal 3V en maximaal 14V. De "absolute maximum rating" voor Vcc is 15V. Heel waarschijnlijk kunnen de INF en INR ingangen deze spanning ook aan, maar ik zou willen aanbevelen om de spanning op deze ingangen tot 5V te beperken. En dat kan ook omdat het servo bord geen hogere stuurspanning dan 5V zal uitgeven.
De 3V3 voedingsspanning lijkt toch een spanning te zijn die op het L298N 5AD bord wordt gemaakt via een lineaire spanningsregelaar (IC in SOT23 behuizing tussen de elco's in). Er staat een pijltje naar buiten toe gericht in witte "silk screen" op de PCB, een teken dat het niet persé voor de TA6568 zelf wordt gebruikt (maar dat is niet zeker te zeggen zonder naar de layout te kijken). Het TA6568 IC lijkt rechtstreeks te (kunnen) worden gevoed vanuit de 3s LiPo (11.1V - 12.6V, dus ruim beneden 15V).
Nu zal ik het draadje niet verder "vervuilen"
, ik heb hopelijk zinvol bijgedragen aan de motorsturing voor het landingsgestel van de Brewster Buffalo.Clear skies and many happy landings,
Jurgen
Laatst bewerkt:
@juwi ,Het schema dat je hebt getekend werkt!
De rest ook bedankt voor het meedenken natuurlijk
Mvg,
Bart
Super duidelijke video, Bart! Heel erg cool! Daar doe ik het voor!
(ik spring ook even een gat in de lucht, credits moeten VOORAL ook naar Max!)
Clear skies and happy landings,
Jurgen
Ik volg het met veel interesse. Fantastisch project weer!
Wat ik me bij het landingsgestel afvraag is of het stevig genoeg is, met name het stangenstelsel waarmee het wordt ingetrokken. Het gaat om het scharnierpunt midden in de stang die aan de wielpoot vastzit: als dat scharnier op wat ruwer terrein onverhoopt in beweging komt, klapt - als ik het goed zie - de wielpoot naar binnen.
Wat ik me bij het landingsgestel afvraag is of het stevig genoeg is, met name het stangenstelsel waarmee het wordt ingetrokken. Het gaat om het scharnierpunt midden in de stang die aan de wielpoot vastzit: als dat scharnier op wat ruwer terrein onverhoopt in beweging komt, klapt - als ik het goed zie - de wielpoot naar binnen.
Bart83
verslagschrijvers
Na een tijdje van stilte hier weer een update.
Doordat ik voor mijn zoon Lucas een sportkistje heb gebouwd heeft het Buffalo project stil gelegen. Het kistje is nu zo goed als gereed dus we gaan weer verder met de Buff.
De afgelopen dagen ben ik bezig geweest met het bouwen van de mock-up van het landingsgestel. Binnenkort een weer een video update.
Mvg,
Bart
Sportkistje voor Lucas:

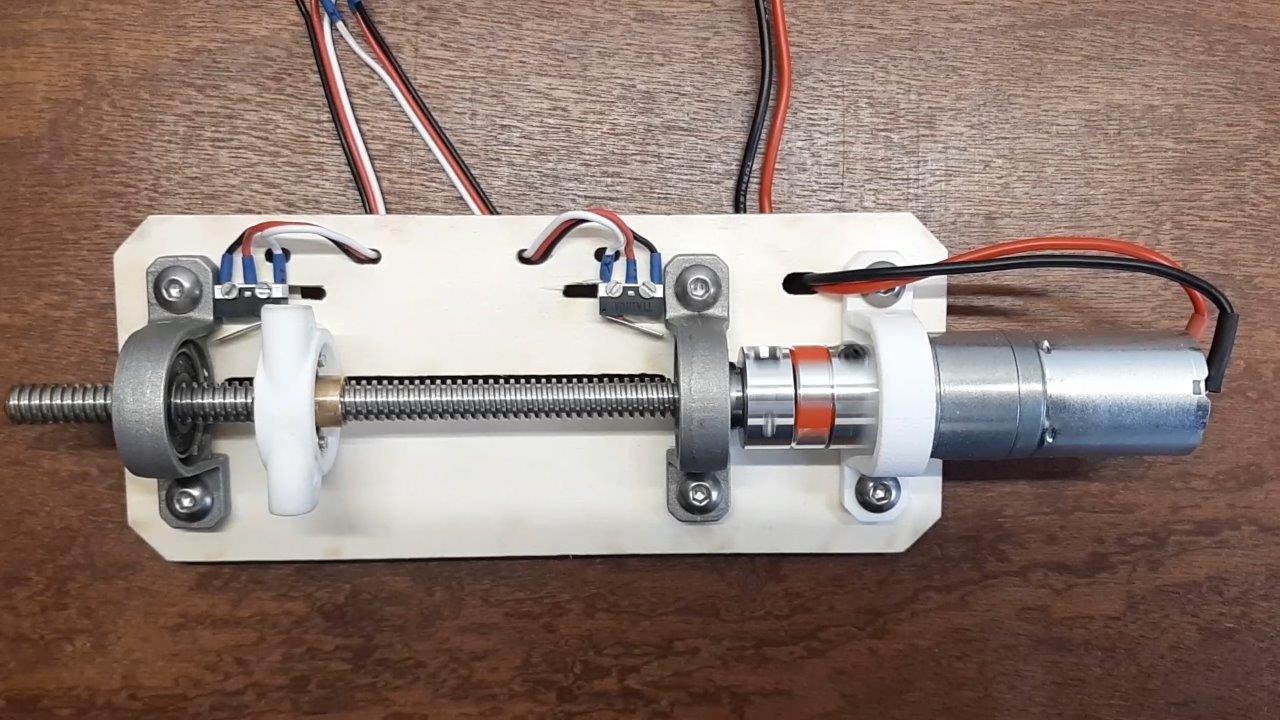
Aandrijving:
Piloot houd alles goed in de gaten:

Ingeklapt . . .

Doordat ik voor mijn zoon Lucas een sportkistje heb gebouwd heeft het Buffalo project stil gelegen. Het kistje is nu zo goed als gereed dus we gaan weer verder met de Buff.
De afgelopen dagen ben ik bezig geweest met het bouwen van de mock-up van het landingsgestel. Binnenkort een weer een video update.
Mvg,
Bart
Sportkistje voor Lucas:
Aandrijving:
Piloot houd alles goed in de gaten:
Ingeklapt . . .
Prachtig werk!
Hoe heb je de grijze onderstel delen gemaakt, is dat 3D geprint? Wordt dat de uiteindelijke versie?
Groetjes,
Hoe heb je de grijze onderstel delen gemaakt, is dat 3D geprint? Wordt dat de uiteindelijke versie?
Groetjes,
Bart83
verslagschrijvers
@pascall : Bedankt!
@Gerald Rutten : Bedankt! De grijze delen zijn inderdaad 3d geprint. Voor de uiteindelijke versie zou ik deze graag in carbon maken maar hier heb ik nog geen ervaring mee.
Pippi zou zeggen ''Ik heb het nog nooit gedaan dus ik denk dat ik het kan''
Hier een video update met uitleg over het systeem :
Mvg,
Bart
@Gerald Rutten : Bedankt! De grijze delen zijn inderdaad 3d geprint. Voor de uiteindelijke versie zou ik deze graag in carbon maken maar hier heb ik nog geen ervaring mee.
Pippi zou zeggen ''Ik heb het nog nooit gedaan dus ik denk dat ik het kan''
Hier een video update met uitleg over het systeem :
Mvg,
Bart
Wow! Nette demo opstelling en weer een heel duidelijke video, Bart!
Overigens: die wielen wegen toch ook nog wat, niet? De twee 5" Du-Bro 500TL wielen die ik op mijn Sea Fury wil zetten wegen bij elkaar al ongeveer 250g, en de Buffalo krijgt 5.5" wielen... Dan zit je al op minimaal 350g + 250g = 600g voor de "main gear".
Als ik even snel reken, kom je dan met twee lineare servo's van in de video genoemde Actuonix met maximaal 2x56g = 112g al gedraaid? Ik neem aan dat je dan één lineare servo per wiel gaat bedienen. Dus een winst in gewicht van zo'n 230g? Dat zou inderdaad een mooi resultaat zijn ...
Clear skies, Jurgen
Overigens: die wielen wegen toch ook nog wat, niet? De twee 5" Du-Bro 500TL wielen die ik op mijn Sea Fury wil zetten wegen bij elkaar al ongeveer 250g, en de Buffalo krijgt 5.5" wielen... Dan zit je al op minimaal 350g + 250g = 600g voor de "main gear".
Als ik even snel reken, kom je dan met twee lineare servo's van in de video genoemde Actuonix met maximaal 2x56g = 112g al gedraaid? Ik neem aan dat je dan één lineare servo per wiel gaat bedienen. Dus een winst in gewicht van zo'n 230g? Dat zou inderdaad een mooi resultaat zijn ...
Clear skies, Jurgen
Laatst bewerkt: