Na een hoop zelfbouwframes begin ik nu aan een nieuw FLIP FPV frame  . Ik ga proberen om de vorderingen regelmatig bij te werken in dit draadje.
. Ik ga proberen om de vorderingen regelmatig bij te werken in dit draadje.

Het kale frame weegt slechts 350 gram en de afstand van motor tot motor is 450 mm. De frameplaten zien er erg netjes afgewerkt uit en er zitten al diverse uitsparingen voor flightcontrollers en andere electronica. Er is rekening gehouden met het KK bord, maar ook met de kleinere controllers zoals de CC3D van Open Pilot en de Naze32.

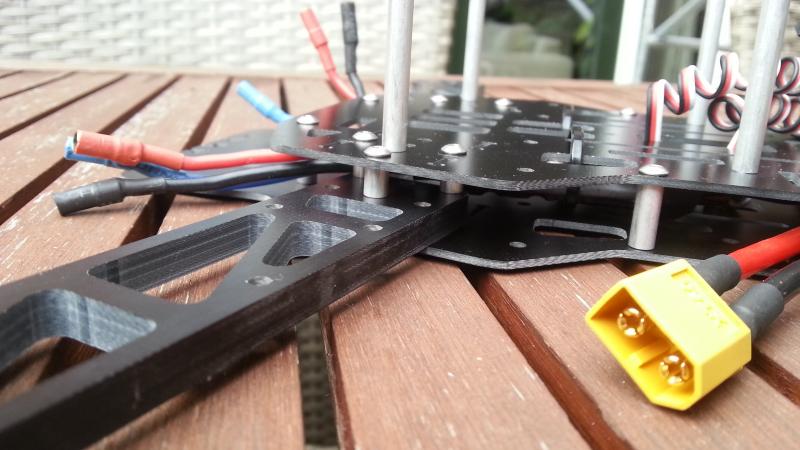
Het frame zal door mij voornamelijk gebruikt gaan worden voor FPV, maar ik wil er echter ook met enige regelmaat gewoon LOS mee kunnen vliegen. Daarom heb ik ervoor gekozen om de voorste 2 armen in de kleur oranje te nemen. De armen zijn van 6,5 mm dik G10. Volgens mij moet je flink je best doen om ze stuk te krijgen.

Een foto van de bijgeleverde hardware en het landingsgestel. Ook wel prettig dat er 2 lengtes in afstandbusjes worden geleverd voor de topplaat. Als je dus wat meer ruimte nodig hebt omdat de pins van je flightcontroller aan de bovenzijde zitten dan kun je wat meer ruimte creëren.

De afstandsbusjes voor de onderplaat. De armen worden straks bevestigd op de plek waar de 3 korte busjes zitten. Tot nu toe past alles perfect en heb ik nergens het idee dat het wringt of dat de kopjes van de schroeven meteen dol draaien.

Ik heb de ESC's aan het power distributie bord vastgezet. Ook heb ik 2 extra jst stekkers vastgesoldeerd, 1 stekker voor de OSD en 1 stekker voor de fpv apparatuur. Als ik op een 4S batterij ga vliegen dan plaats ik hier uiteraard nog een 12 volt BEC tussen. Na het solderen heb ik de contacten afgedekt met hotglue.
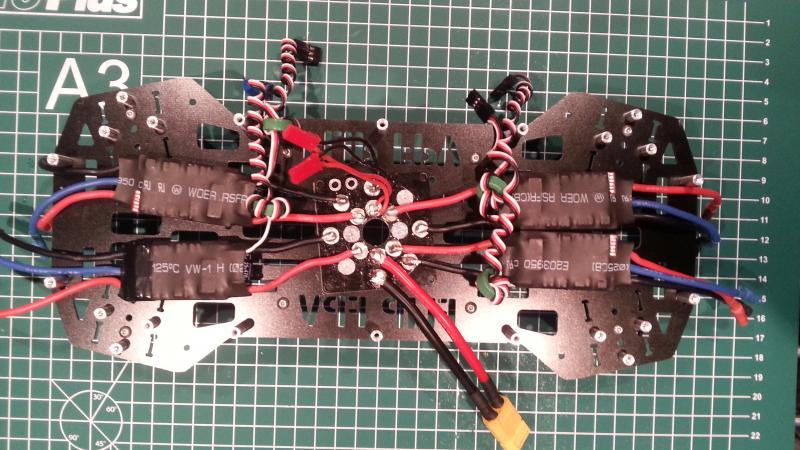
Nu de ESC's vast gesoldeerd zitten is het tijd om de bodemplaat te bevestigen. Op aanraden van de fabrikant gebruik ik dit keer voor het borgen van de schroeven geen loctite maar blanke nagellak. Dit schijnt genoeg borging te geven, maar toch iets makkelijker los te halen te zijn. Uiteraard ga ik dit om de paar vluchten testen. Hieronder de 2 bodemplaten van het frame na bevestiging. Het is nu een supersterk geheel geworden.

De volgende stap is de armen bevestigen. De armen van de FLIP FPV zitten vanaf de onderzijde van het frame maar met 3 schroeven vast. Mocht je het voor elkaar krijgen om een arm te breken dan is deze dus supersnel te vervangen.
De motorzijde van de armen hebben 4 even lange sleuven waardoor de meeste motoren wel zullen passen. Ook kun hierdoor beter bepalen aan welke zijde je de kabels uit laat komen.

Onderzijde van het frame met het 'landingsgestel'. Je kunt de 4 meegeleverde poten er vrij makkelijk op klikken, maar toch zitten ze goed vast.

Het begint al ergens op te lijken . Op dit moment heb ik de lange afstandhouders voor de bovenplaat gemonteerd.
. Op dit moment heb ik de lange afstandhouders voor de bovenplaat gemonteerd.

De motorkabels heb ik toch maar verlegd. Eerst kwamen deze naast de armen uit het frame en nu heb ik ze tussen de bussen waar de arm aan vast zit doorgeleid. Daarnaast heb ik de kabels nu gevlochten, enerzijds omdat ze aan de lange kant waren, anderzijds omdat het er zo beter uitziet.

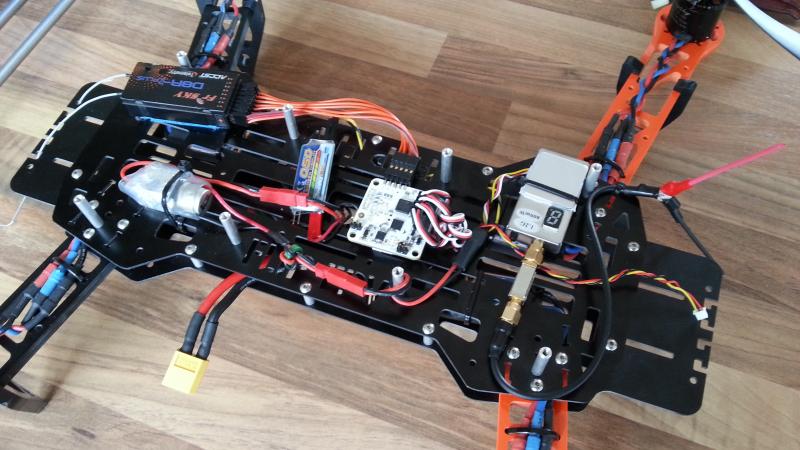
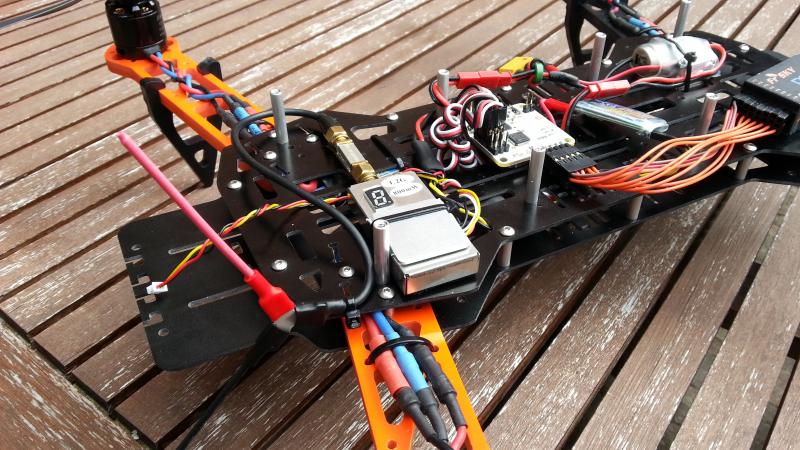
De flightcontroller heeft ook zijn plekje op de middenplaat gekregen. Zo zonder FPV apparatuur ziet het er maar leeg uit. Ik heb ervoor gekozen om de controller iets voor het midden te plaatsen. Voor de sensors zal dit zeker geen verschil maken. De videozender komt straks aan de voorkant te zitten. Bij het vliegen met een Gopro kan de lipo achter de flightcontroller geplaatst worden. Zonder Gopro aan boord zal de Lipo onder het frame komen te hangen of bovenop de topplaat.

----------------------------------------------
Verdere setup
- Hobbyking F20-A ESC met SimonK firmware
- Sunnysky X-2212 980 Kv motoren
- Naze32 Acro
- 8" Gemfan carbon versterkt slowflyer propeller.
- 4S LiPo batterij 2500 mah
FPV setup:
- 1.3 Ghz zender met inverted Vee antenne
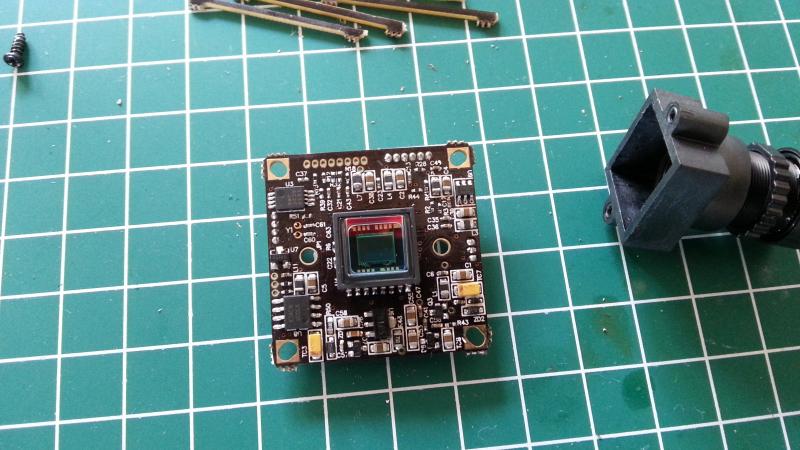
- PZ0420 CCD camera van Sony (600 TVL)
. Ik ga proberen om de vorderingen regelmatig bij te werken in dit draadje.
Het kale frame weegt slechts 350 gram en de afstand van motor tot motor is 450 mm. De frameplaten zien er erg netjes afgewerkt uit en er zitten al diverse uitsparingen voor flightcontrollers en andere electronica. Er is rekening gehouden met het KK bord, maar ook met de kleinere controllers zoals de CC3D van Open Pilot en de Naze32.
Het frame zal door mij voornamelijk gebruikt gaan worden voor FPV, maar ik wil er echter ook met enige regelmaat gewoon LOS mee kunnen vliegen. Daarom heb ik ervoor gekozen om de voorste 2 armen in de kleur oranje te nemen. De armen zijn van 6,5 mm dik G10. Volgens mij moet je flink je best doen om ze stuk te krijgen.
Een foto van de bijgeleverde hardware en het landingsgestel. Ook wel prettig dat er 2 lengtes in afstandbusjes worden geleverd voor de topplaat. Als je dus wat meer ruimte nodig hebt omdat de pins van je flightcontroller aan de bovenzijde zitten dan kun je wat meer ruimte creëren.
De afstandsbusjes voor de onderplaat. De armen worden straks bevestigd op de plek waar de 3 korte busjes zitten. Tot nu toe past alles perfect en heb ik nergens het idee dat het wringt of dat de kopjes van de schroeven meteen dol draaien.
Ik heb de ESC's aan het power distributie bord vastgezet. Ook heb ik 2 extra jst stekkers vastgesoldeerd, 1 stekker voor de OSD en 1 stekker voor de fpv apparatuur. Als ik op een 4S batterij ga vliegen dan plaats ik hier uiteraard nog een 12 volt BEC tussen. Na het solderen heb ik de contacten afgedekt met hotglue.
Nu de ESC's vast gesoldeerd zitten is het tijd om de bodemplaat te bevestigen. Op aanraden van de fabrikant gebruik ik dit keer voor het borgen van de schroeven geen loctite maar blanke nagellak. Dit schijnt genoeg borging te geven, maar toch iets makkelijker los te halen te zijn. Uiteraard ga ik dit om de paar vluchten testen. Hieronder de 2 bodemplaten van het frame na bevestiging. Het is nu een supersterk geheel geworden.
De volgende stap is de armen bevestigen. De armen van de FLIP FPV zitten vanaf de onderzijde van het frame maar met 3 schroeven vast. Mocht je het voor elkaar krijgen om een arm te breken dan is deze dus supersnel te vervangen.
De motorzijde van de armen hebben 4 even lange sleuven waardoor de meeste motoren wel zullen passen. Ook kun hierdoor beter bepalen aan welke zijde je de kabels uit laat komen.
Onderzijde van het frame met het 'landingsgestel'. Je kunt de 4 meegeleverde poten er vrij makkelijk op klikken, maar toch zitten ze goed vast.
Het begint al ergens op te lijken
. Op dit moment heb ik de lange afstandhouders voor de bovenplaat gemonteerd.
De motorkabels heb ik toch maar verlegd. Eerst kwamen deze naast de armen uit het frame en nu heb ik ze tussen de bussen waar de arm aan vast zit doorgeleid. Daarnaast heb ik de kabels nu gevlochten, enerzijds omdat ze aan de lange kant waren, anderzijds omdat het er zo beter uitziet.
De flightcontroller heeft ook zijn plekje op de middenplaat gekregen. Zo zonder FPV apparatuur ziet het er maar leeg uit. Ik heb ervoor gekozen om de controller iets voor het midden te plaatsen. Voor de sensors zal dit zeker geen verschil maken. De videozender komt straks aan de voorkant te zitten. Bij het vliegen met een Gopro kan de lipo achter de flightcontroller geplaatst worden. Zonder Gopro aan boord zal de Lipo onder het frame komen te hangen of bovenop de topplaat.
----------------------------------------------
Verdere setup
- Hobbyking F20-A ESC met SimonK firmware
- Sunnysky X-2212 980 Kv motoren
- Naze32 Acro
- 8" Gemfan carbon versterkt slowflyer propeller.
- 4S LiPo batterij 2500 mah
FPV setup:
- 1.3 Ghz zender met inverted Vee antenne
- PZ0420 CCD camera van Sony (600 TVL)
Laatst bewerkt door een moderator:





") ) ben ik vandaag helaas nog niet echt aan het bouwen toe gekomen.
) ben ik vandaag helaas nog niet echt aan het bouwen toe gekomen.")
