Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Union Wrestler 1:50
- Topicstarter JaFa
- Startdatum
Hoe ga je al deze mechaniekjes gangbaar en waterdicht houden?
Bij dit soort schepen heb je zeer regelmatig water aan dek, en aluminium en messing zijn gecombineerd met water nou niet elkaars beste vrienden.
Onderstaand de Ral kleuren van Boskalis
Bekijk bijlage 354893
Hey Adam, hartstikke bedankt, voor je vragen, wel inderdaad, de pinnen zijn niet echt een probleem, die lopen vrij schuivend met as vet of dikke uierzalf zal hier niet erg veel doorkomen, de forks dat is wel een probleem door hun vork vorm maken zij een verbinding natuurlijk, ik vrees dat ik een beetje water daar zal moeten tolereren.
De elektrolyse waarover jij spreekt zal geen probleem vormen, voor zo ver ik mijn studie boeken herinner is dit in functie van het debiet, aangezien het verplaatsbaar debiet in deze pinnen totaal verwaarloosbaar is zal ik er niet meer zijn vooraleer er corrosie laat staan erosie optreed.
anderzijds, de alu buisjes zijn zo vervangen, alles zit met schroefdraad en wat draad borging vast dus kan ook zo weer uit elkaar. Hzet vervangen van deze buisjes neemt niet langer dan 5 minuten in beslag.
Wie weet maak ik er nu nog wel inox buisjes van, damn je zet me aan het werk.
Nu die Forks dat is inderdaad iets, ik had zelf al gedacht om kleine dekseltjes te maken met een veertje maar dat is natuurlijk niet zoals het op de boot is, daar zetten ze er een pot op.
Hoe doen andere karmfork forumers dit?
Rubbertje voor de pinnen kan en zou geen probleem zijn maar weeral door de lastige vorm van de vorken maakt dit niets uit, nu moet ik eerlijk zijn die vorken zitten er maar op voor de sier het op RC vlak zijn deze ook nutteloos.
Ik ga over je opmerkingen nog eens nadenken.
De winches zijn met de behuizing waterdicht tot bovenaan en ik veronderstel niet dat deze ooit water zullen pakken...
Bedankt voor het kleur advies.
Adam was me net even voor, maar hij is wat vergeten
. De Anti Fouling is Rood RAL 3009.

Hey thanks, dat maakt het plaatje compleet, vandaag heb ik maar wat dingen uit de romp gezaagd, ik heb aleen een kemel geschoten met de boegschroef dat moet ik morgen of straks nog even rechtzetten.
Hey hoe heb jij die forks waterdicht gemaakt?
Hey heren, ik ben stilaan eens aan het nadenken over de aandrijving, wie heeft een idee of link voor een eenvoudige maar relatief goede 360° draai inrichting, zodat zonder al te veel problemen de truster rond kan?
Ik had zelf aan het hambug IMTH systeem gedacht maar ik hoor links en rechts wel wat tegenstanders...
Alvast erg bedankt voor de input.
Ik had zelf aan het hambug IMTH systeem gedacht maar ik hoor links en rechts wel wat tegenstanders...
Alvast erg bedankt voor de input.
hey Jan , inderdaad , het systeem van IMTH is niet zoals het hoort te zijn .
Een bedrijfszeker systeem is een servo van 2x90° te nemen met een tandwiel (met of zonder riem) en dan 2 op 1 nemen zodat de truster 2 x 180° beweegt .
Als je daar een kleine tijdvertraging opzet vanuit de zender verkrijg je een heel betrouwbare sturing .
Meerdere scheepsmodellen in onze vereniging varen met deze opzet en we hebben daar nog nooit problemen mee gehad .
Groetjes
Ronny
Een bedrijfszeker systeem is een servo van 2x90° te nemen met een tandwiel (met of zonder riem) en dan 2 op 1 nemen zodat de truster 2 x 180° beweegt .
Als je daar een kleine tijdvertraging opzet vanuit de zender verkrijg je een heel betrouwbare sturing .
Meerdere scheepsmodellen in onze vereniging varen met deze opzet en we hebben daar nog nooit problemen mee gehad .
Groetjes
Ronny
hey Jan , inderdaad , het systeem van IMTH is niet zoals het hoort te zijn .
Een bedrijfszeker systeem is een servo van 2x90° te nemen met een tandwiel (met of zonder riem) en dan 2 op 1 nemen zodat de truster 2 x 180° beweegt .
Als je daar een kleine tijdvertraging opzet vanuit de zender verkrijg je een heel betrouwbare sturing .
Meerdere scheepsmodellen in onze vereniging varen met deze opzet en we hebben daar nog nooit problemen mee gehad .
Groetjes
Ronny
Hey Ronny, bedankt hier ga ik eens over nadenken ik dacht als je bij een gewone servo wat extra weerstanden tussen de buitenste poten van de pot soldeerden dat de slaglengte groter werd maar dit moet ik eens terug uitzoeken, misschien is dat dan een oplossing.
Ik zal het zeker testen, bedankt voor de input, en het besparen van veel geld!
Macrabbit
Vriend van modelbouwforum.nl
Hey hoe heb jij die forks waterdicht gemaakt?
Hey Jan,
Als je in mijn verslag kijkt bij postnr #135 kun je het frame zien van de Forks en de Pinnen. Dit wordt in zijn geheel onder het dek aangebracht. Nu zie je nog boutjes met een cilindrische kop, maar die zijn inmiddels vervangen door schroefjes met verzonken kop. Mooi vlak dus met het dek van printplaat. Tussen dit dek en het frame van de Forks en Pinnen heb ik een plaatje rubber van 1 mm dik. Niet van dat stijve rubber maar lekker soepel. Hierin 4 gaatjes voor de bevestigings schroefjes en 4 gaten die overeenkomen met de buisjes voor de Forks en de Pinnen. Gaten in het rubber net even kleiner dan de diameter van de buisjes die omhoog komen. Dit zou theoretisch genoeg moeten zijn om te voorkomen dat hier water door naar binnen komt. Bij de Karmforks lijkt dat voldoende omdat deze aan de bovenkant dicht zijn met de vleugel platen. Er zou nog wel wat water binnen kunnen komen tussen de buitenbuizen en de binnenkant die omhoog komt. Bij de pinnen zou theoretisch wel iets water binnen kunnen komen. Maar de praktijk zal het uitwijzen. En een beetje water kan ik ook niet van wakker liggen.
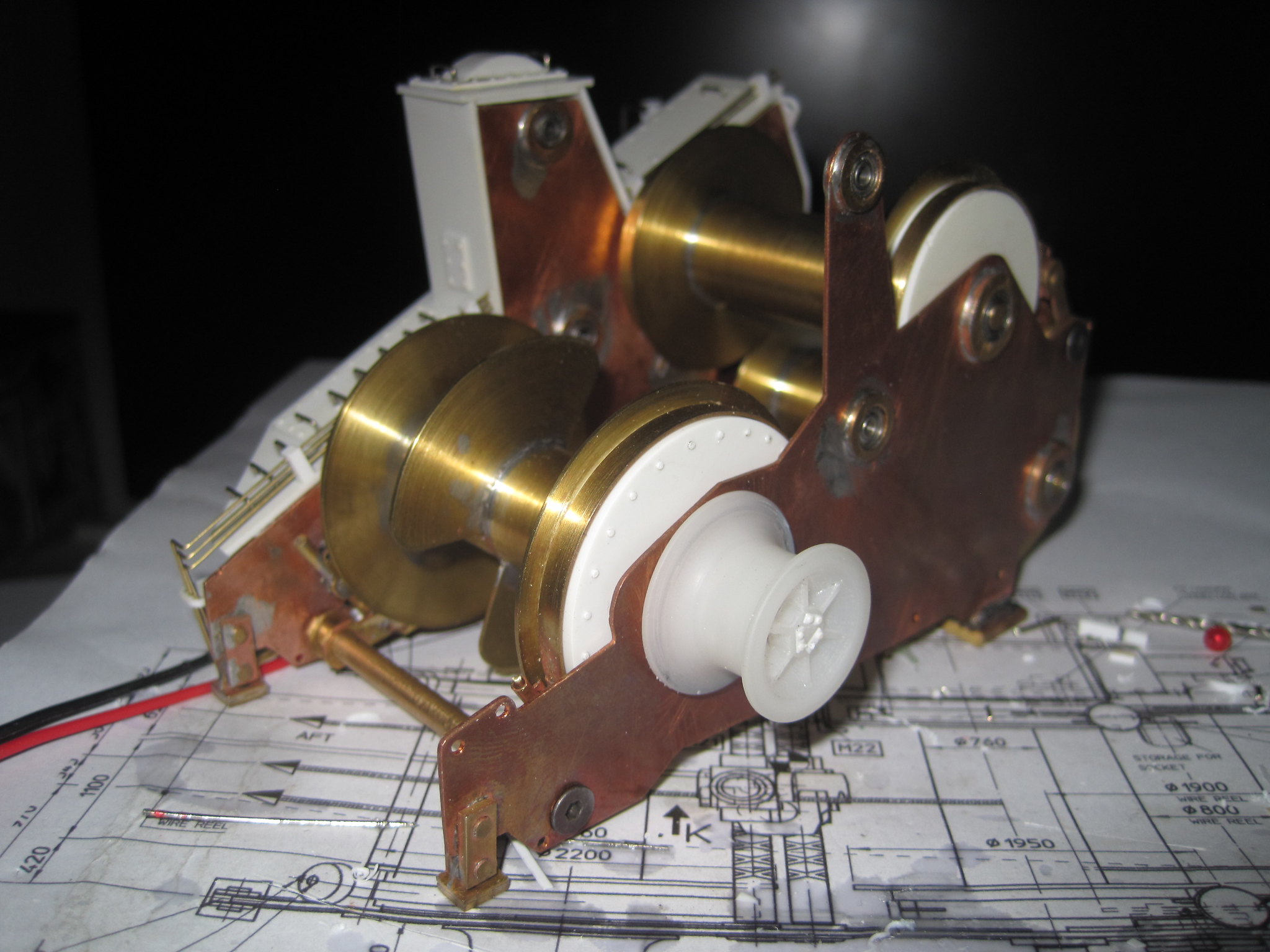
Erg mooi veel werk met dat styreenEen kleine, voorlopig de laatste update, wegens een tijdelijke lichamelijke beperking, het resultaat van een verloren gevecht met mijn dochters paard... Vrees ik dat het wel enkele weken misschien wel maanden duurt voor ik weer iets bouw, het lukt wel maar gaat zo ontzettend traag dat ik er gefrustreerd van wordt vandaar.
Na het mechanisch werk, werk ik steeds af en detaileer ik met styreen, alles was zo goed als af enkel "moertjes" moesten nog worden bijgeplakt, wat ik nu nog moet doen is wat inspectie luiken luiken op het messing zetten en wat leidingen links en rechts plaatsen, de hydraulische leidingen maak ik met electrodraad AGW 28 - 26 en 24 respectievelijk 0,8 tot 1,4mm. de gaten in de verschillende motoren zijn er al en alle leidingen steken net genoeg uit deze lijm ik met ZAP. De koppelingen (deze zijn bij de echte winch met rode plakband omwonden) worden of geschilderd of met rode microtape aangebracht, deze tape trek wat samen als je hem verwarmd dus geeft een strak resultaat.
Anyway wat foto's:
Achteraan zie je dat er nog wat koper mot worden weggehaald, dit soort dingen gaat moeten wachten...
Verder ga ik de nodige bestellingen doen, en de ESC's misschien installeren, ik hoop dat dit me wel lukt, misschien kan ik een beetje de electronica afwerken, we zien wel...
Al met al toch nog een leuke update, de mensen met meer detail foto's zullen merken dat bijna alles wat er op de echte winch aanzit terug te vinden is.
Dit is een heel erg leuk projectje...
Tot de volgende...



Dat zou kunnen maar hoe simpelder men het maakt , hoe minder er stuk kan gaan .90 graden servo's met een "versnelling" er op zijn niet echt meer van deze tijd, zijn mooiere oplossingen voor....
Blijft er ook nog het prijsverschil , een servo van 90° kost maar €49,00 , enkele tandwielen of riempjes en je bent gesteld .
Het perfekte systeem om via de elektronica trusters te sturen , ben ik nog niet tegengekomen , ze hebben allemaal nog een pak nadelen .
Groetjes
Ronny
Ok tijd voor de zoveelste update, ik ben dan toch maar begonnen de romp in orde te zetten, ter verduidelijking, deze heb ik via Marcrabit, op dit forum bemachtigd, ook de thrusters komen van dat adres.
Je moet het warm water niet heruitvinden.
Ik heb hard gewerkt aan een aantal delen, verschansing, gaten voor schroeven, boegschroeven, de kont rol, enz...
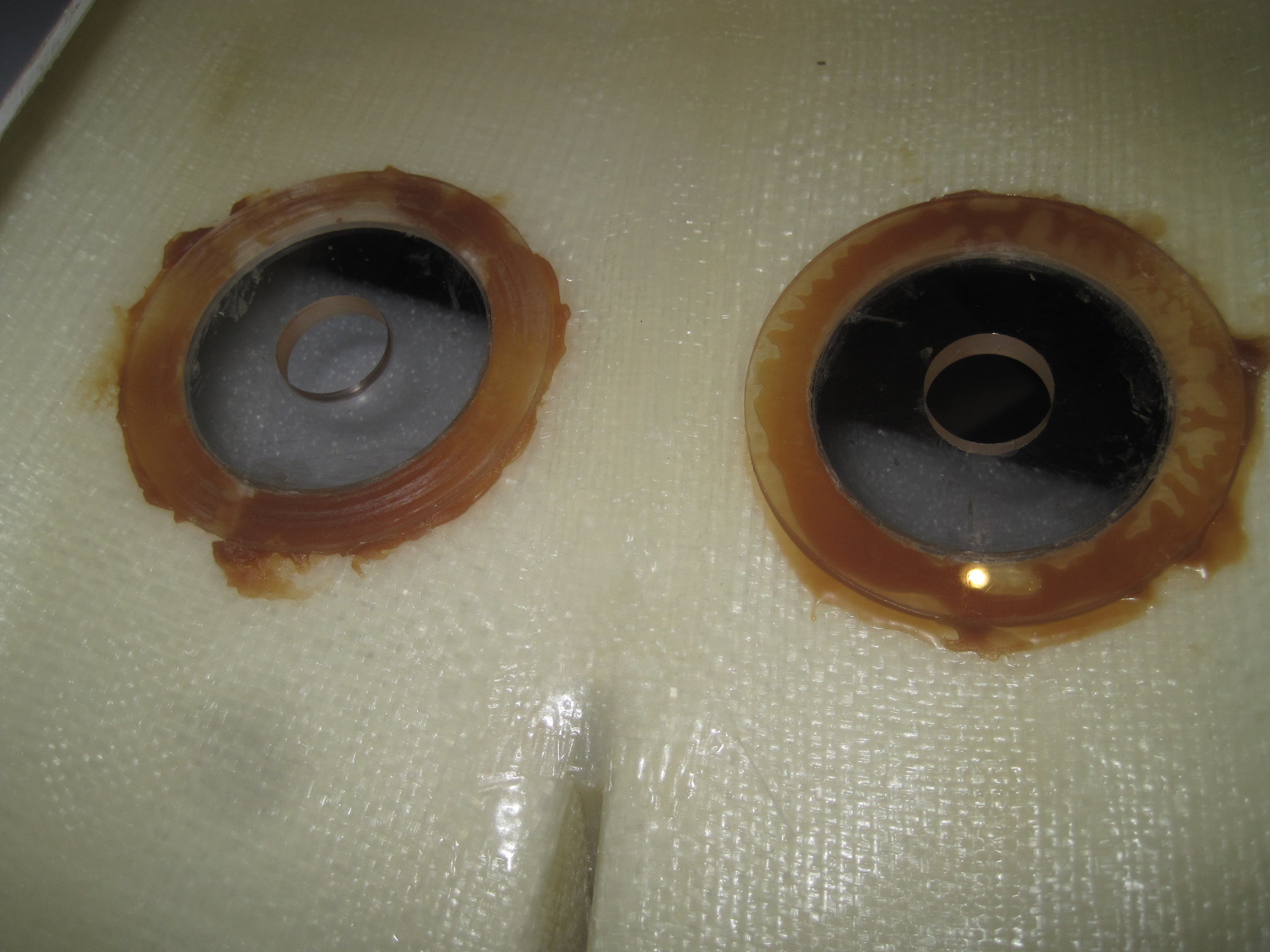
Een overzichtje de gaten van de thrusters, deze hebben ook op de echte een grote bodemplaat vandaar ik dit zo heb gemaakt, 2 grote gaten, met een perspex inleg stuk, vervolgens worden daar de messing basis delen van de motoren verlijmd.
 IMG_4806 by Jan Fabri, on Flickr
IMG_4806 by Jan Fabri, on Flickr
 IMG_4810 by Jan Fabri, on Flickr
IMG_4810 by Jan Fabri, on Flickr
 IMG_4809 by Jan Fabri, on Flickr
IMG_4809 by Jan Fabri, on Flickr
Waarom heb ik dit nu zo gedaan, op de volgende foto zie je de kleine spatie tussen romp en truster "cirkel" deze zit ook op de echte romp anderzijds heb ik op deze manier een perfect platte basis die mooi onder de juiste hoek kon worden gesteld.
 IMG_4812 by Jan Fabri, on Flickr
IMG_4812 by Jan Fabri, on Flickr
De aandrijving is ondertussen getest en werkt naar behoren, ik moet enkel nog de servo's modificeren, ik ga waarschijnlijk op de uiteinde van de potentiometer in de servo een 2,7 a 3k weerstand solderen, dit drijft de servo normaal naar 180°. Op deze manier krijg ik dan toch een 360° sturing al is het niet met eindeloze rotatie... Maar wie weet komt er nog wel een oplossing voor, ik bekijk dit nog...
 IMG_4826 by Jan Fabri, on Flickr
IMG_4826 by Jan Fabri, on Flickr
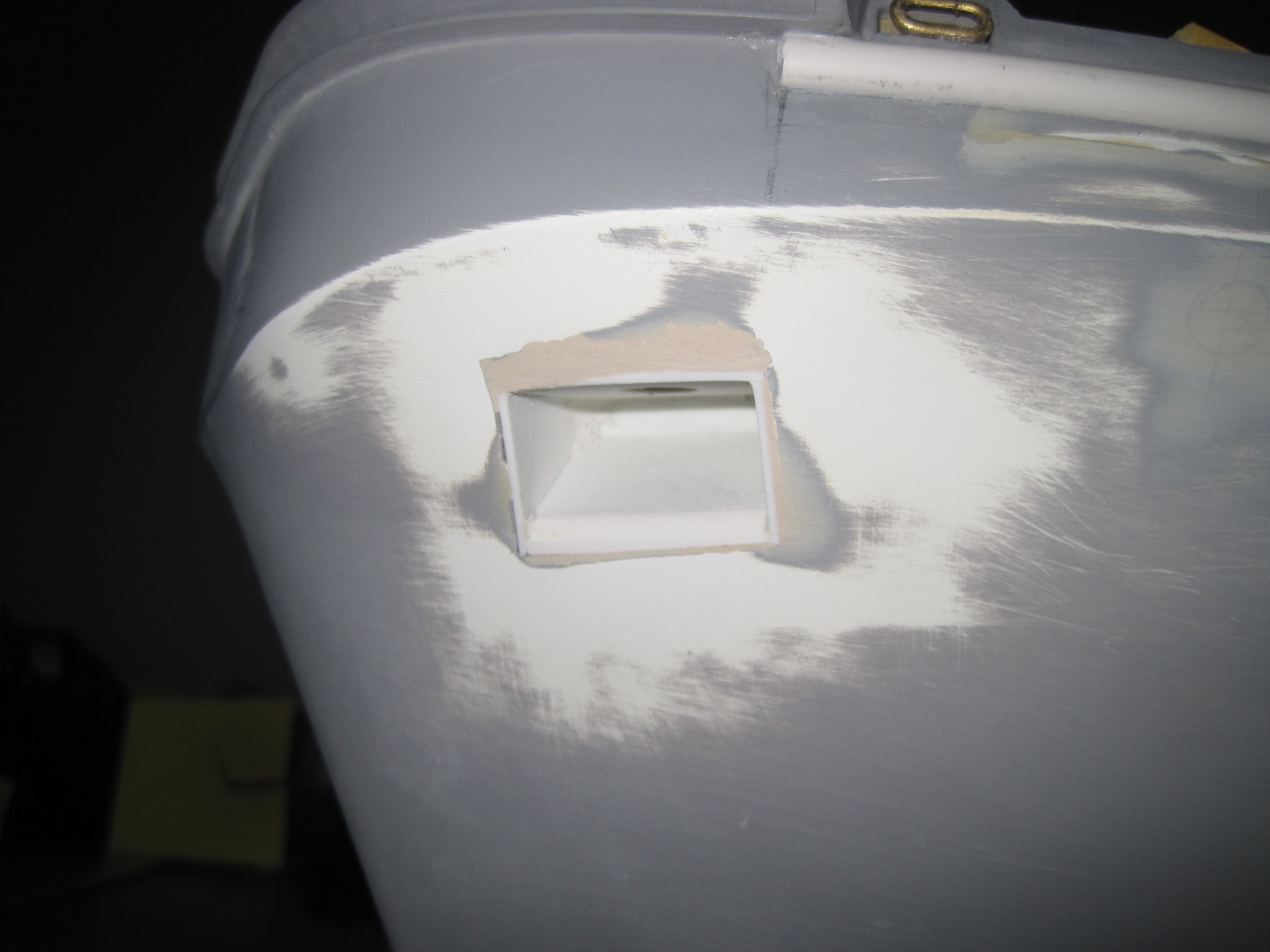
Dan nog wat gaten voor de boegschroef, dit had beter gekund ik had dit ferm verkloot initieel het gat was veel te groot, de buis die ik had te kort enz... Uiteindelijke met creatief met lijm en plakband heb ik dit allemaal terug hersteld zonder dat ik noemenswaardig moest plamuren. Nu plamuren moet spijtig genoeg, wat een rotklus vind ik dat, bij alles wat je doet moet je terug plamuren pffff.
Wat boegschroef momentjes:
 IMG_4821 by Jan Fabri, on Flickr
IMG_4821 by Jan Fabri, on Flickr
 IMG_4807 by Jan Fabri, on Flickr
IMG_4807 by Jan Fabri, on Flickr
 IMG_4830 by Jan Fabri, on Flickr
IMG_4830 by Jan Fabri, on Flickr
Nog wat ankergaten gemaakt ook hier ontbrak het niet aan enthousiasme, met als gevolg een gat, misschien iets te groot . gelukkig is er weer die plamuur...
. gelukkig is er weer die plamuur...
Om de anker kluizen te maken heb ik wel even bezig geweest er is niets recht aan letterlijk elk deel ervan staat onder een hoek, bizar.
Ik heb ook even getest of de anker er makkelijk in en uit kan, en dit werkt echt perfect.
Nog wat gebroddel en het resultaat:
 IMG_4840 by Jan Fabri, on Flickr
IMG_4840 by Jan Fabri, on Flickr
 IMG_4844 by Jan Fabri, on Flickr
IMG_4844 by Jan Fabri, on Flickr
 IMG_4843 by Jan Fabri, on Flickr
IMG_4843 by Jan Fabri, on Flickr
 IMG_4846 by Jan Fabri, on Flickr
IMG_4846 by Jan Fabri, on Flickr
Alles lijkt mooi vlak maar na de volgende spuit beurt bekijk ik alles nog even.
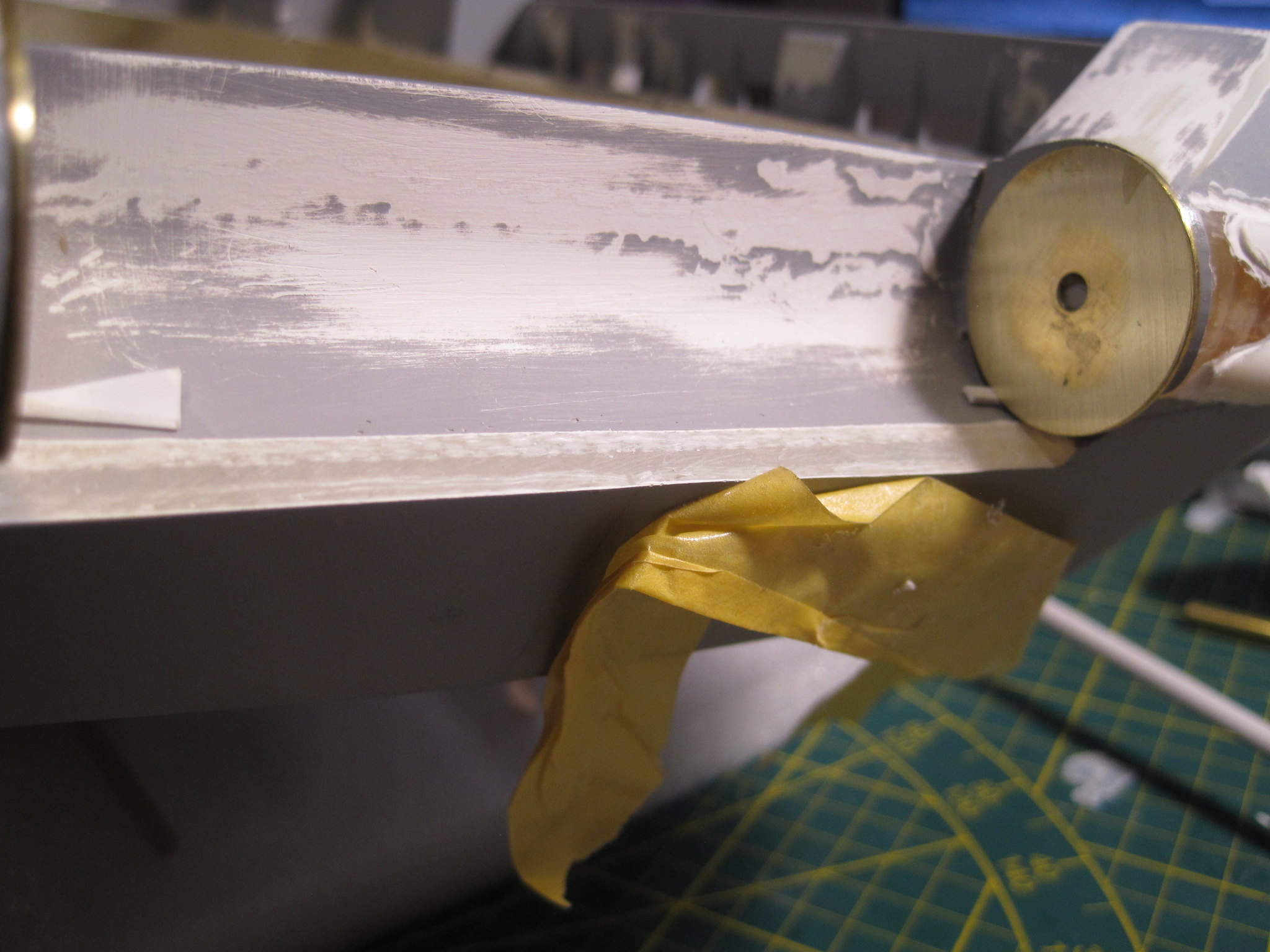
Ik heb nog veel dingen afgewerkt maar er zijn niet overal foto's van, gisteren heb ik een hele dag bezig geweest met haar kont, moet zeggen er zijn slechtere dingen niet?
Dit is het resultaat, er moet nog heel wat worden geschuurd:
 IMG_4832 by Jan Fabri, on Flickr
IMG_4832 by Jan Fabri, on Flickr
 IMG_4833 by Jan Fabri, on Flickr
IMG_4833 by Jan Fabri, on Flickr
 IMG_4834 by Jan Fabri, on Flickr
IMG_4834 by Jan Fabri, on Flickr
Nog wat roosters, en gaten aangebracht:
 IMG_4827 by Jan Fabri, on Flickr
IMG_4827 by Jan Fabri, on Flickr
 IMG_4818 by Jan Fabri, on Flickr
IMG_4818 by Jan Fabri, on Flickr
De stootbanden, damn dit was een lange klus heeft de ganse dag geduurd, en dan moeten ze nog geplamuurd en geschuurd worden...
 IMG_4847 by Jan Fabri, on Flickr
IMG_4847 by Jan Fabri, on Flickr
 IMG_4848 by Jan Fabri, on Flickr
IMG_4848 by Jan Fabri, on Flickr
Ook de kimkielen zijn geplaatst en nog een aantal dingen, volgende update plaats ik wat algemene overzicht foto's...
Tot...
Je moet het warm water niet heruitvinden.
Ik heb hard gewerkt aan een aantal delen, verschansing, gaten voor schroeven, boegschroeven, de kont rol, enz...
Een overzichtje de gaten van de thrusters, deze hebben ook op de echte een grote bodemplaat vandaar ik dit zo heb gemaakt, 2 grote gaten, met een perspex inleg stuk, vervolgens worden daar de messing basis delen van de motoren verlijmd.
IMG_4806 by Jan Fabri, on FlickrIMG_4810 by Jan Fabri, on FlickrIMG_4809 by Jan Fabri, on FlickrWaarom heb ik dit nu zo gedaan, op de volgende foto zie je de kleine spatie tussen romp en truster "cirkel" deze zit ook op de echte romp anderzijds heb ik op deze manier een perfect platte basis die mooi onder de juiste hoek kon worden gesteld.
IMG_4812 by Jan Fabri, on FlickrDe aandrijving is ondertussen getest en werkt naar behoren, ik moet enkel nog de servo's modificeren, ik ga waarschijnlijk op de uiteinde van de potentiometer in de servo een 2,7 a 3k weerstand solderen, dit drijft de servo normaal naar 180°. Op deze manier krijg ik dan toch een 360° sturing al is het niet met eindeloze rotatie... Maar wie weet komt er nog wel een oplossing voor, ik bekijk dit nog...
IMG_4826 by Jan Fabri, on FlickrDan nog wat gaten voor de boegschroef, dit had beter gekund ik had dit ferm verkloot initieel het gat was veel te groot, de buis die ik had te kort enz... Uiteindelijke met creatief met lijm en plakband heb ik dit allemaal terug hersteld zonder dat ik noemenswaardig moest plamuren. Nu plamuren moet spijtig genoeg, wat een rotklus vind ik dat, bij alles wat je doet moet je terug plamuren pffff.
Wat boegschroef momentjes:
IMG_4821 by Jan Fabri, on FlickrIMG_4807 by Jan Fabri, on FlickrIMG_4830 by Jan Fabri, on FlickrNog wat ankergaten gemaakt ook hier ontbrak het niet aan enthousiasme, met als gevolg een gat, misschien iets te groot
. gelukkig is er weer die plamuur...Om de anker kluizen te maken heb ik wel even bezig geweest er is niets recht aan letterlijk elk deel ervan staat onder een hoek, bizar.
Ik heb ook even getest of de anker er makkelijk in en uit kan, en dit werkt echt perfect.
Nog wat gebroddel en het resultaat:
IMG_4840 by Jan Fabri, on FlickrIMG_4844 by Jan Fabri, on FlickrIMG_4843 by Jan Fabri, on FlickrIMG_4846 by Jan Fabri, on FlickrAlles lijkt mooi vlak maar na de volgende spuit beurt bekijk ik alles nog even.
Ik heb nog veel dingen afgewerkt maar er zijn niet overal foto's van, gisteren heb ik een hele dag bezig geweest met haar kont, moet zeggen er zijn slechtere dingen niet?
Dit is het resultaat, er moet nog heel wat worden geschuurd:
IMG_4832 by Jan Fabri, on FlickrIMG_4833 by Jan Fabri, on FlickrIMG_4834 by Jan Fabri, on FlickrNog wat roosters, en gaten aangebracht:
IMG_4827 by Jan Fabri, on FlickrIMG_4818 by Jan Fabri, on FlickrDe stootbanden, damn dit was een lange klus heeft de ganse dag geduurd, en dan moeten ze nog geplamuurd en geschuurd worden...
IMG_4847 by Jan Fabri, on FlickrIMG_4848 by Jan Fabri, on FlickrOok de kimkielen zijn geplaatst en nog een aantal dingen, volgende update plaats ik wat algemene overzicht foto's...
Tot...
Laatst bewerkt:
Prachtige update Jan. Ik geniet er van 
Je gaat als de brandweer.....
Je gaat als de brandweer.....
Macrabbit
Vriend van modelbouwforum.nl
Hey Jan,
Alweer een hele diepe buiging vanaf deze kant. Je bent in korte tijd al heel erg gevorderd met je romp. Ik verdenk je er ook stiekem van dat je hier ook al even mee bezig bent. Zie dat je ook de verschansing rondom al hebt geplaatst. Ankerkluizen, alsmede de waterinlaten en de stootbanden op zijn plek. Chapeau hoor. Nu zeg je ook dat de kimkielen geplaatst zijn. Hier zie ik geen foto van. Wat nu aan de zijkant zit is ook een soort stootlijst.")
Heerlijk om te zien hoe ze groeit Jan.
Alweer een hele diepe buiging vanaf deze kant. Je bent in korte tijd al heel erg gevorderd met je romp. Ik verdenk je er ook stiekem van dat je hier ook al even mee bezig bent. Zie dat je ook de verschansing rondom al hebt geplaatst. Ankerkluizen, alsmede de waterinlaten en de stootbanden op zijn plek. Chapeau hoor. Nu zeg je ook dat de kimkielen geplaatst zijn. Hier zie ik geen foto van. Wat nu aan de zijkant zit is ook een soort stootlijst.
Heerlijk om te zien hoe ze groeit Jan.
vandaag heb ik wat zitten spelen met de thrusters, allemaal leuk deze werken met brushless motoren, allemaal ok.
Voor mij de eerste keer dat ik hiermee werk maar ik zit met het volgende, bij ouderwetse motoren kan je de snelheid vrij traag laten lopen, zodanig dat je de prop kan zien draaien...
Nu ik heb mijn regelaar geprogrameerd voor de laagste start rpm, maar dat is nog vrij snel.
Volgens wat info op het inet, komt dit door de regelaar, hebben jullie ervaring met een regelaar(s) die wel mooie traagloop hebben? En die betaal baar zijn, de motor heeft geen sensor!
Ik moet er toch nog 1 hebben voor de boegschroef dan koop ik net zo lief 2 die wel traag lopen...
Alvast bedankt!
Voor mij de eerste keer dat ik hiermee werk maar ik zit met het volgende, bij ouderwetse motoren kan je de snelheid vrij traag laten lopen, zodanig dat je de prop kan zien draaien...
Nu ik heb mijn regelaar geprogrameerd voor de laagste start rpm, maar dat is nog vrij snel.
Volgens wat info op het inet, komt dit door de regelaar, hebben jullie ervaring met een regelaar(s) die wel mooie traagloop hebben? En die betaal baar zijn, de motor heeft geen sensor!
Ik moet er toch nog 1 hebben voor de boegschroef dan koop ik net zo lief 2 die wel traag lopen...
Alvast bedankt!
Jan, Hoeveel KV zijn die motoren van je en hebben ze een vertraging? Mijn ervaring is dat je een zo laag mogelijk KV getal moet hebben. 750KV werkt aardig bij 7,4 Volt. Kijk even in het bouwverslag van de Yarra door Lex Verkuijl. Daar heb ik veel van opgestoken. Ook in het verslag van mijn tanker(avatar) heb ik wat bevindingen vast gelegd. Meer trial and error, dus geen wetenschappelijk verhaal. Gr. Klaas.
https://www.modelbouwforum.nl/threads/havensleper-yarra-van-deans-marine.236592/page-6
https://www.modelbouwforum.nl/threads/bouw-verslag-esso-berlin-raffaele-cafiero.266675/
https://www.modelbouwforum.nl/threads/havensleper-yarra-van-deans-marine.236592/page-6
https://www.modelbouwforum.nl/threads/bouw-verslag-esso-berlin-raffaele-cafiero.266675/
Waarom zou je je props willen zien draaien? Ze zitten toch meest onderwater.........bij ouderwetse motoren kan je de snelheid vrij traag laten lopen, zodanig dat je de prop kan zien draaien
Maar zonder dollen, je props zo langzaam laten draaien brengt niets.
Heb inmiddels zelf de nodige ervaring met brushless motoren, maar ik heb er nog nooit last van gehad, dat ze in hun laagste toerental te hard draaien.
Slip, weerstand, wind, stroming, ongelijk oppakken van motoren, zijn factoren ook invloed hebben op hoe langzaam je kan varen.
Prachtige update Jan. Ik geniet er van
Je gaat als de brandweer.....
Ja wel ik wil het een en ander klaar hebben vooraleer het werk er weer aankomt, dan duurt het weer heeeeeeeel lang voor er wat tijd te vinden zal zijn, ondertussen ben ik aan de betere hand en beginnen er allerlei taken verwacht te worden, ik voel nu al dat mijn modelbouw tijd sterk verminderd... Maar we doen gewoon rustig voort...
Hey Jan,
Alweer een hele diepe buiging vanaf deze kant. Je bent in korte tijd al heel erg gevorderd met je romp. Ik verdenk je er ook stiekem van dat je hier ook al even mee bezig bent. Zie dat je ook de verschansing rondom al hebt geplaatst. Ankerkluizen, alsmede de waterinlaten en de stootbanden op zijn plek. Chapeau hoor. Nu zeg je ook dat de kimkielen geplaatst zijn. Hier zie ik geen foto van. Wat nu aan de zijkant zit is ook een soort stootlijst.
Heerlijk om te zien hoe ze groeit Jan.
Hey Sjoerd, nee toch niet ik ben slechts een goede week met de romp bezig, de kimkielen foto komt nog, ik vergeet hier en daar wel eens wat foto's te maken vandaar, nu ik moet wel toegeven ik heb hier op het forum een heel leuke spiekbrief, als ik het niet weet spiek ik even, dat scheelt heel wat tijd, ik moet juist zien dat ik mij niet laat verleiden aan het Boxer gehalte, ik heb al een aantal keer iets gemaakt wat dan op de Wrestler net iets anders is, zoals bepaalde gaten in de verschansing...
Jan, Hoeveel KV zijn die motoren van je en hebben ze een vertraging? Mijn ervaring is dat je een zo laag mogelijk KV getal moet hebben. 750KV werkt aardig bij 7,4 Volt. Kijk even in het bouwverslag van de Yarra door Lex Verkuijl. Daar heb ik veel van opgestoken. Ook in het verslag van mijn tanker(avatar) heb ik wat bevindingen vast gelegd. Meer trial and error, dus geen wetenschappelijk verhaal. Gr. Klaas.
Ok dit vind ik belangrijk!
Ik ben de ganse dag bezig geweest met de thrusters, vooral om te zien waar hoe en wanneer ik zal hier wel een update van maken in het kort,
Mijn probleem, tis te zeggen, het probleem waar ik met mijn HK regelaars op stuit, is dat de aanspring snelheid van de regelaar niets te maken heeft met het minimum van de motor, de motor loopt al op 2,5 volt, maar de aanspring snelheid van die regelaar is op S3(ca 10,5v) bijna 5Volt, wil ik de motoren stapvoets laten draaien moet ik de input voltage op 4 Volt zetten, wat ik heb geprobeerd is in parallel een gewone ESC te zetten die dan de ingang voltage van de brushless regelt als je deze ESC programmeert van 4v naar S3(10,5v) dan kan je de motor laten traag lopen, maar het kan toch niet zijn dat dit de bedoeling is.
Mijn vraag is nu zijn alle brushless ESC's zo? Of ligt het aan mijn HK brol.
Op dit moment zitten er 840Kv in, maar ik heb ook getest met 18polen 320Kv en 24polen 220Kv allen hebben hetzelfde probleem.
Nu je hebt gelijk op 6 a 7,5 volt lopen ze redelijk mooi maar dan zie ik niet goed in waarom ik nog op S3 zou werken.
Ik wil gewoon een ESC die van zichtbaar draaien tot zijn maximum kan.
Waarom zou je je props willen zien draaien? Ze zitten toch meest onderwater.........
Maar zonder dollen, je props zo langzaam laten draaien brengt niets.
Heb inmiddels zelf de nodige ervaring met brushless motoren, maar ik heb er nog nooit last van gehad, dat ze in hun laagste toerental te hard draaien.
Slip, weerstand, wind, stroming, ongelijk oppakken van motoren, zijn factoren ook invloed hebben op hoe langzaam je kan varen.
Ik begrijp wat je zegt, maar laat het dan een fetisj zijn of zo, ik wil dat de motoren ook heel fijn zijn te regelen vandaar, maar misschien moet ik niet wensen om de volledige S3 spanning te benutten, al denk ik at dat dan weer trekkracht kost... mmm problemen problemen...
Ik volg dit met grote bewondering op de achtergrond, evenals het vorige bouwverslag.
Man man, hoe is het mogelijk, dat je daadwerkelijk alle disciplines tot in de finesse beheerst, diep respect!!!
Mvg,
Pascal.
Hey Pascal, leuk dat je volgt, nu alles beheersen is een groot woord hoor, veel gaat ook via trial and error, soms wat boeren verstand helpt wel en niet te vergeten de input van menig forumlid natuurlijk.
zoals je ziet vraag ik ook gewoon soms wat raad en voor de rest testen en zoals mijn dochter dan zegt, "ga je weer rook maken papa?"

Hey Jan , ik gebruik een Roxxy outrunner C35-30-45 300Kv op mijn Fairplay 26 .
Deze kunnen mooi traag draaien zonder stoten of horten , traag genoeg om de toeren te kunnen tellen met de overbrenging van 1/2 van de schottels .
Natuurlijk met een bijhorende Roxxy regelaar Roxxy 930 en dit op een loodbatterij van 12Volt .
Groetjes
Ronny
Deze kunnen mooi traag draaien zonder stoten of horten , traag genoeg om de toeren te kunnen tellen met de overbrenging van 1/2 van de schottels .
Natuurlijk met een bijhorende Roxxy regelaar Roxxy 930 en dit op een loodbatterij van 12Volt .
Groetjes
Ronny