Daar zijn we weer met een kleine update, het is alweer een tijdje geleden.
Dingen in en om het huis hadden ook even wat aandacht nodig en de elektronica druppelde binnen uit het land met de lange muur.
En ik heb even de tijd genomen om eens uit te zoeken hoe ik alles straks aan elkaar moet knopen en aan een Arduino moet plakken.
dit is namelijk een geheel nieuw hoofdstuk voor mij.
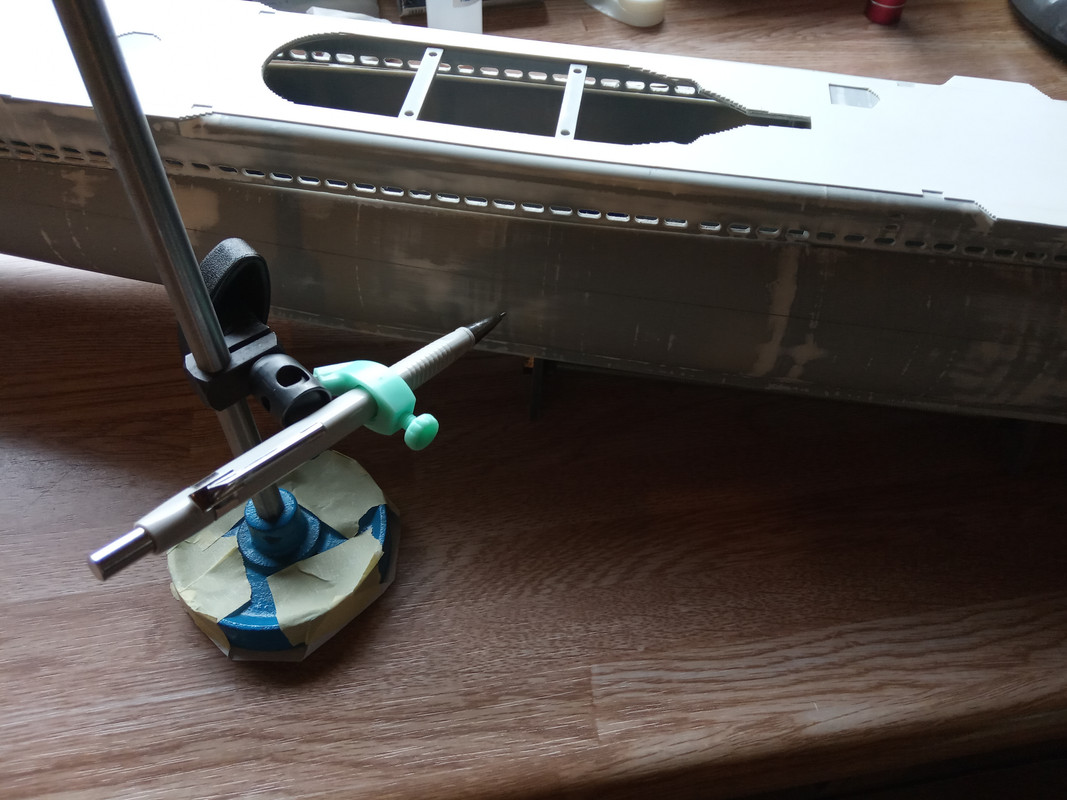
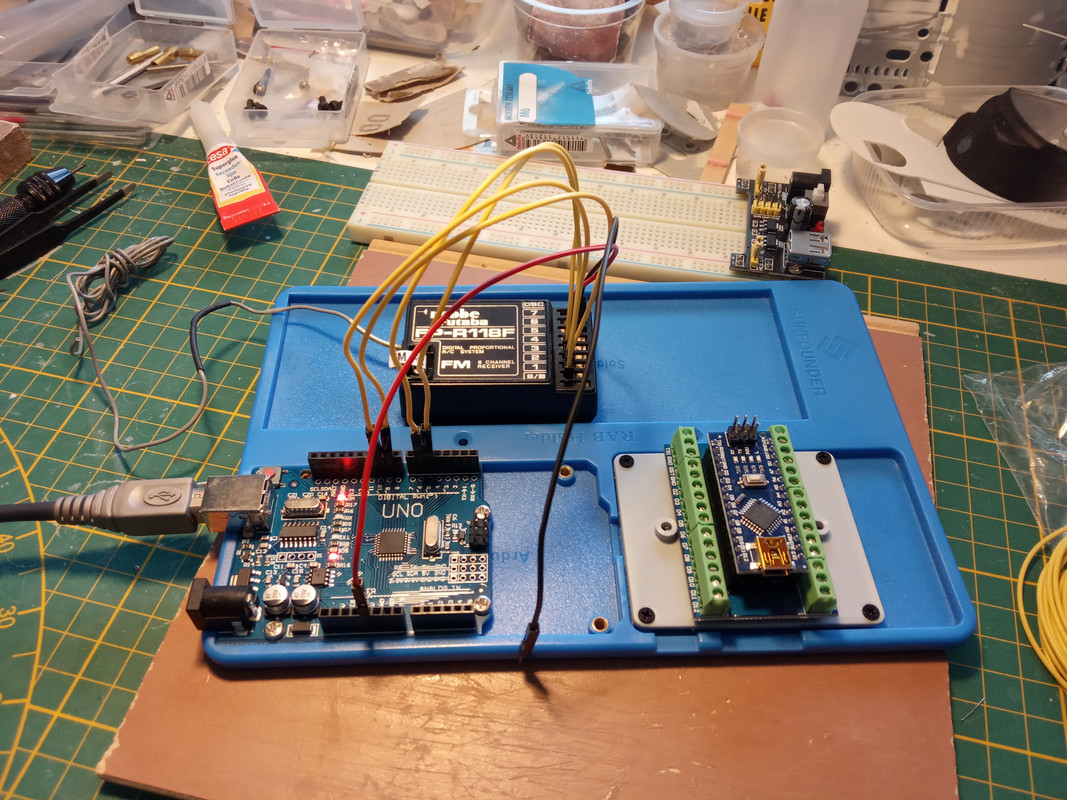
Het is me wel gelukt om mijn ontvanger met een Arduino uit te lezen, ik heb nog geen idee wat ik met het resultaat moet doen
Maar dit gaat zondemeer van pas komen als ik de Arduino in de WTC ga knutselen.
Ik ben de inhoud van de WTC alvast aan het uitvogelen want bestellingen nemen best wel wat tijd in beslag voordat ze aankomen.
En ik heb het liefst voor zover het kan alvast alles in huis als ik er mee begin.
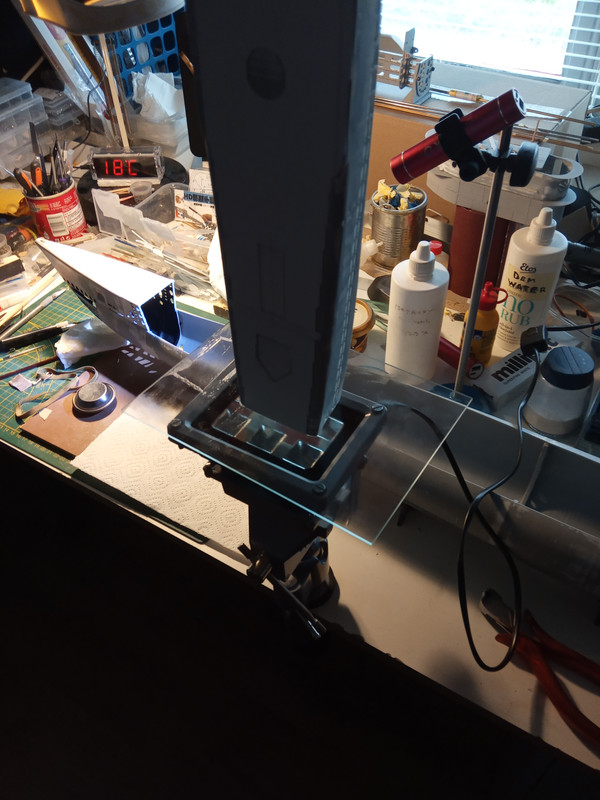
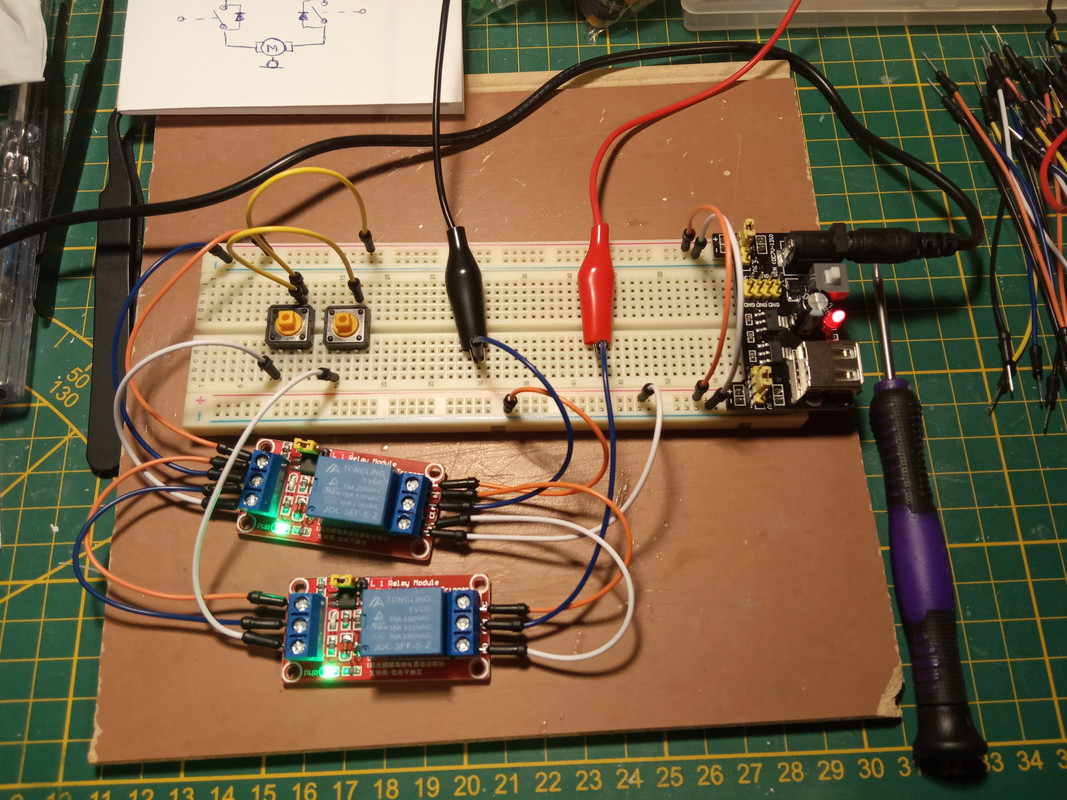
Al wel een test opstelling gemaakt met twee relais voor de duik pomp.
En een steun voor de motoren gefreesd.
Tevens twee M2 borg schroefjes in de hevels voor de boeg duikroeren gemaakt.
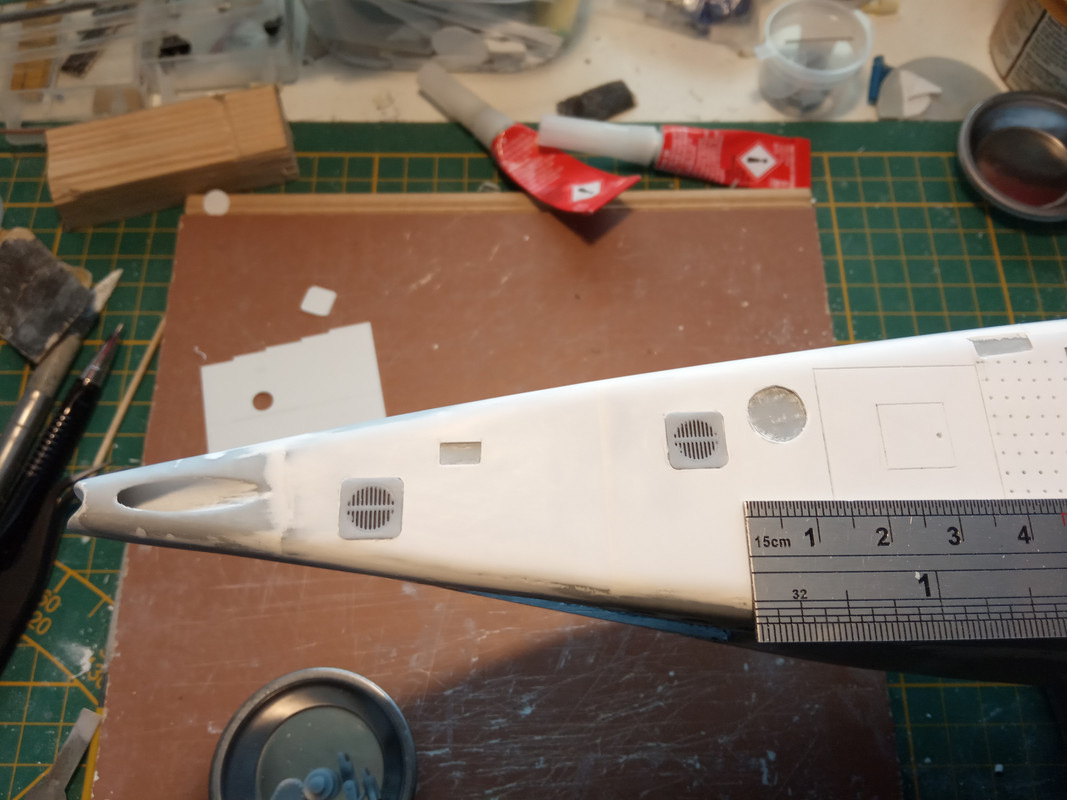
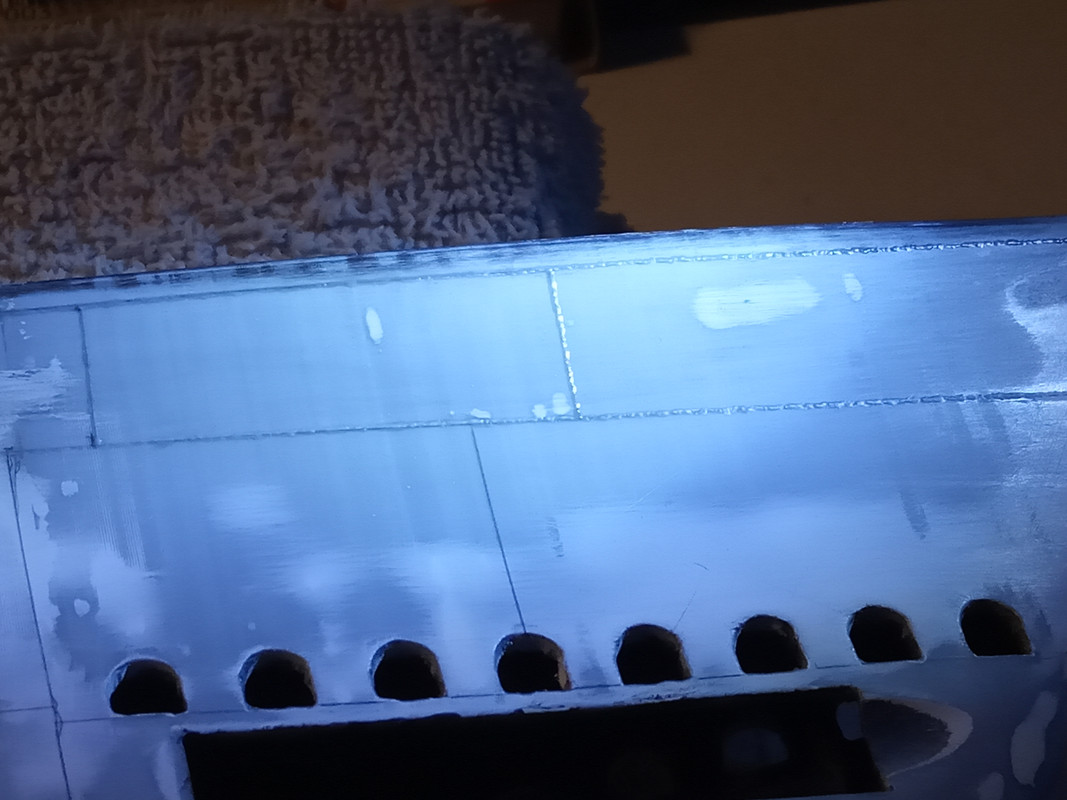
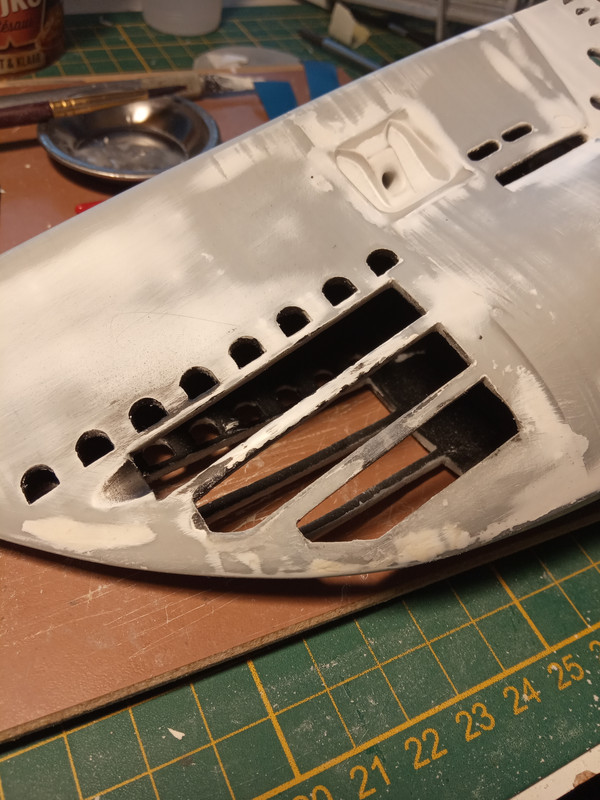
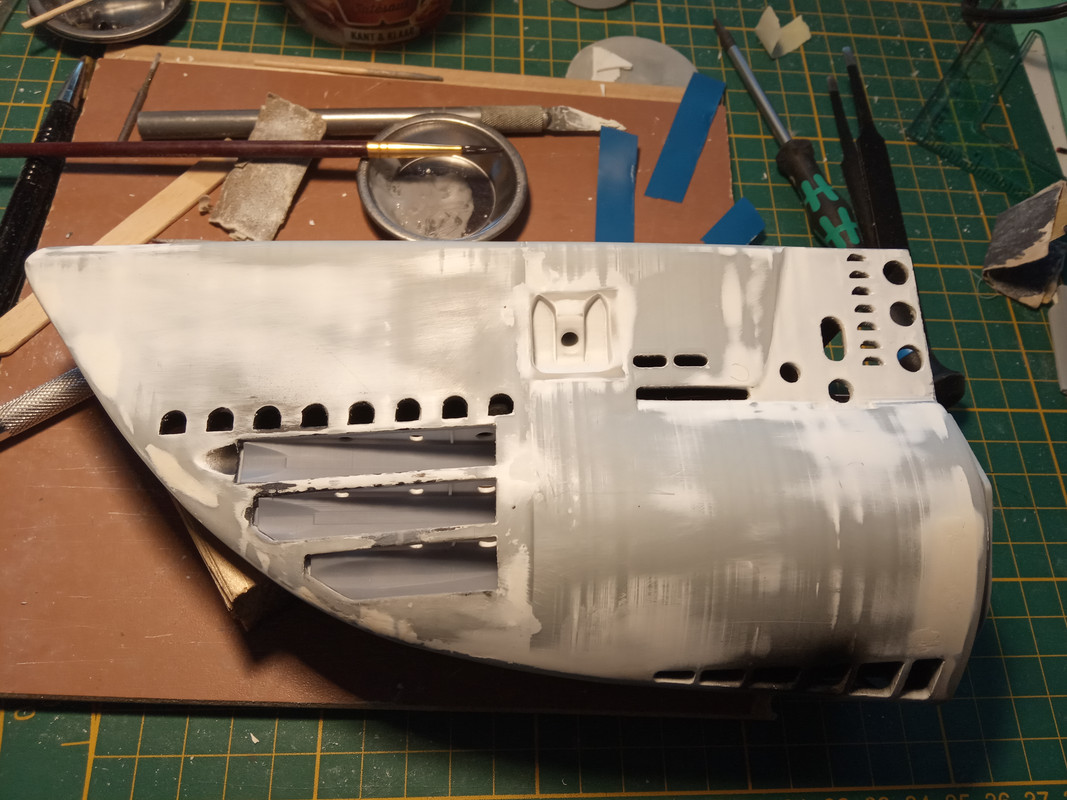
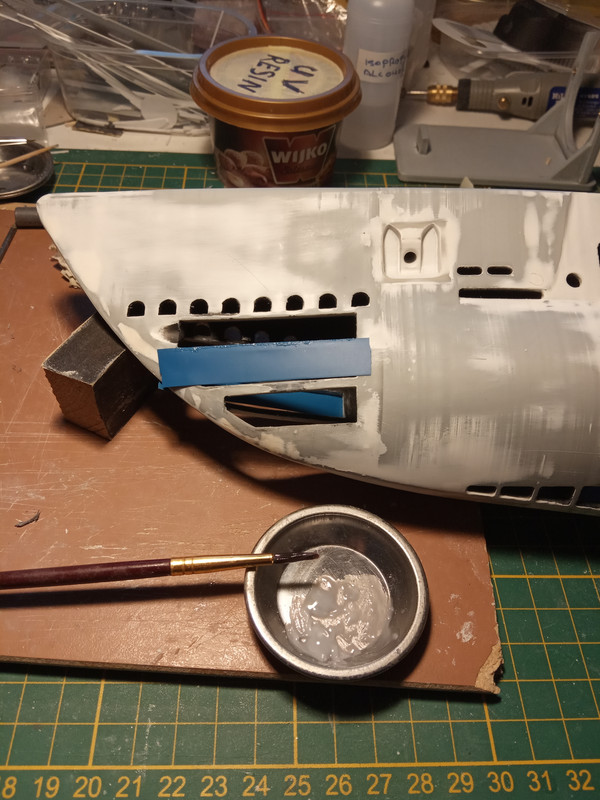
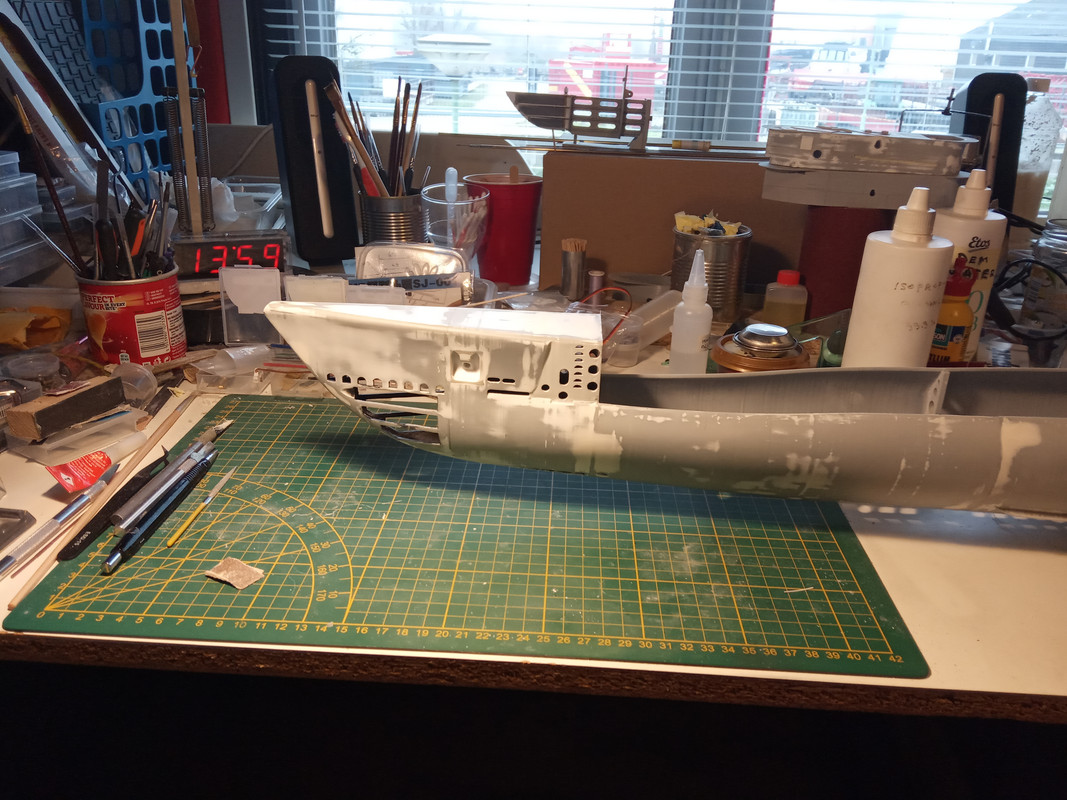
Ik heb inmiddels weer het werk aan het dek hervat, zodra daar weer wat interessante foto's uit voort komen dan maak ik wel weer een update.
Helaas deze keer niet zoveel te melden, al dit uitzoekwerk voor de elektronica neemt best wel veel tijd in beslag.
Zodra ik dit een beetje snap dan worden denk ik de updates weer interessant.
De proefopstelling van de pomp aansturing.
En de opstelling voor het uitlezen van mijn ontvanger.
M2 schroefjes aangebracht in de heveltjes, die kunnen nu op het asje geborgd worden.

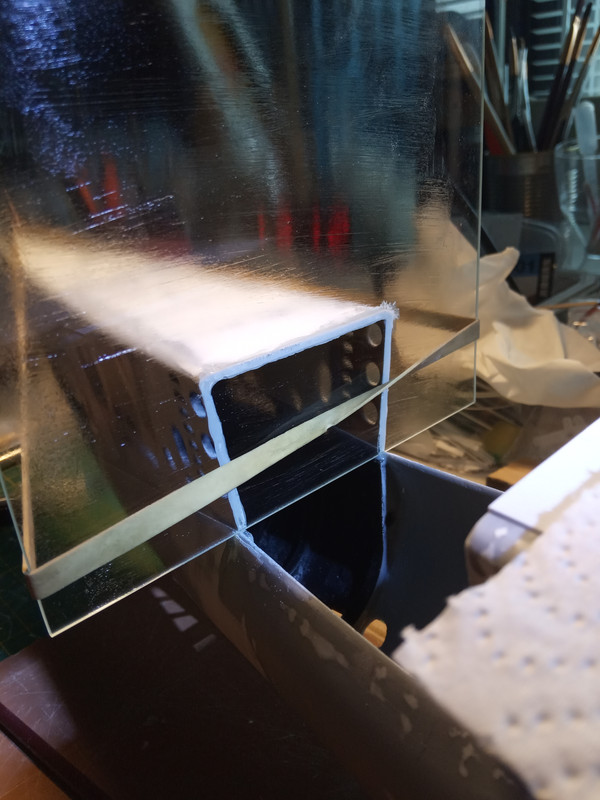
En de motorsteun uitgefreesd uit een stukje aluminium plaat.
De gaten voor het bevestigen van de plaat moeten nog geboord worden, hiervoor moet ik eerst nog de exacte plaats bepalen.
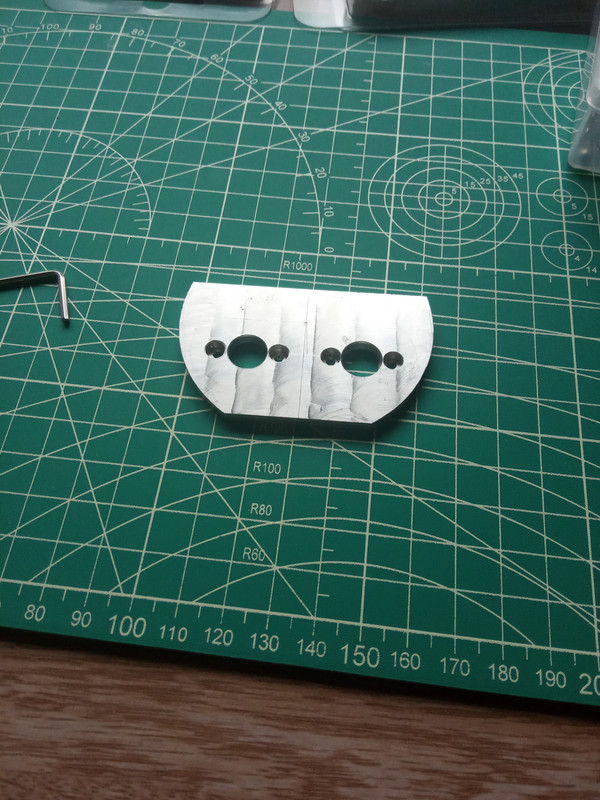
De bevestiging schroefjes zijn verzonken en liggen mooi vlak met de plaat.
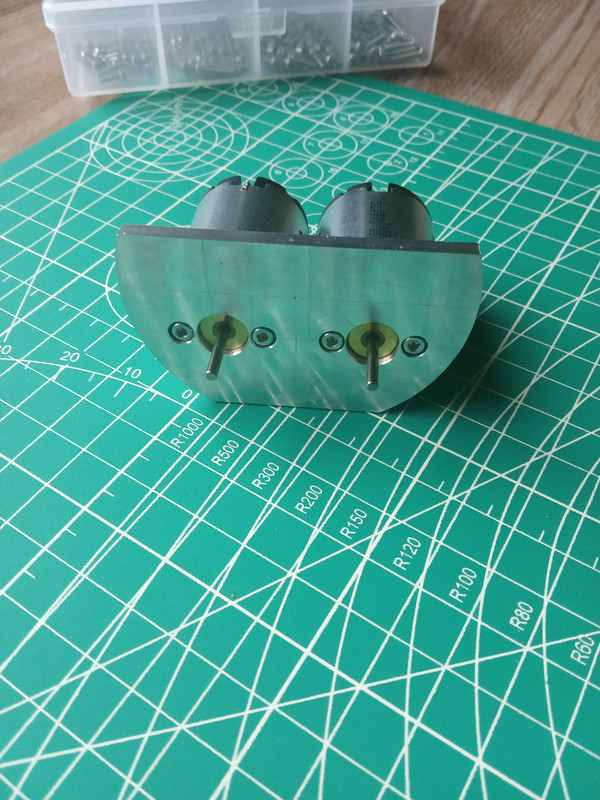
En de voorkant.
Het aluminium kan zo ook mooi als koelplaat dienen.
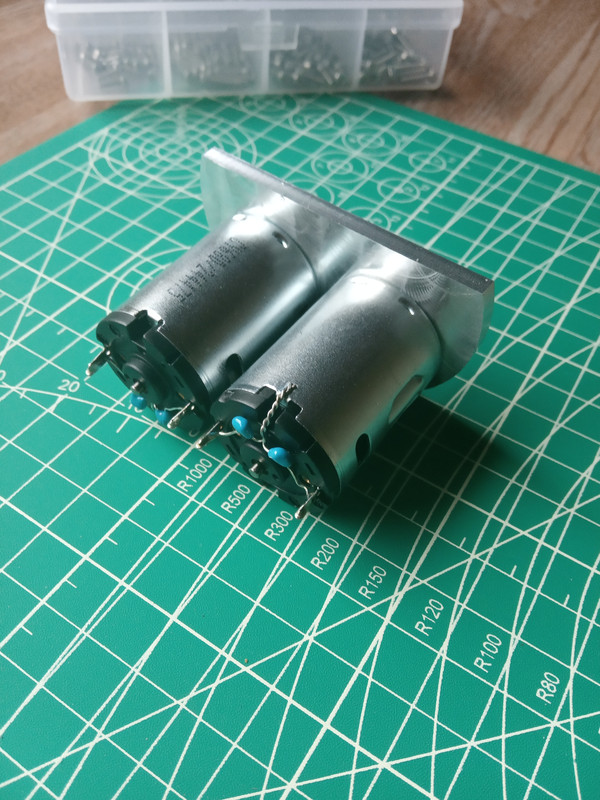
En zoals het geheel straks in de WTC komt, ik denk dat het zo mooi past.

Dingen in en om het huis hadden ook even wat aandacht nodig en de elektronica druppelde binnen uit het land met de lange muur.
En ik heb even de tijd genomen om eens uit te zoeken hoe ik alles straks aan elkaar moet knopen en aan een Arduino moet plakken.
dit is namelijk een geheel nieuw hoofdstuk voor mij.
Het is me wel gelukt om mijn ontvanger met een Arduino uit te lezen, ik heb nog geen idee wat ik met het resultaat moet doen
Maar dit gaat zondemeer van pas komen als ik de Arduino in de WTC ga knutselen.
Ik ben de inhoud van de WTC alvast aan het uitvogelen want bestellingen nemen best wel wat tijd in beslag voordat ze aankomen.
En ik heb het liefst voor zover het kan alvast alles in huis als ik er mee begin.
Al wel een test opstelling gemaakt met twee relais voor de duik pomp.
En een steun voor de motoren gefreesd.
Tevens twee M2 borg schroefjes in de hevels voor de boeg duikroeren gemaakt.
Ik heb inmiddels weer het werk aan het dek hervat, zodra daar weer wat interessante foto's uit voort komen dan maak ik wel weer een update.
Helaas deze keer niet zoveel te melden, al dit uitzoekwerk voor de elektronica neemt best wel veel tijd in beslag.
Zodra ik dit een beetje snap dan worden denk ik de updates weer interessant.
De proefopstelling van de pomp aansturing.
En de opstelling voor het uitlezen van mijn ontvanger.
M2 schroefjes aangebracht in de heveltjes, die kunnen nu op het asje geborgd worden.
En de motorsteun uitgefreesd uit een stukje aluminium plaat.
De gaten voor het bevestigen van de plaat moeten nog geboord worden, hiervoor moet ik eerst nog de exacte plaats bepalen.
De bevestiging schroefjes zijn verzonken en liggen mooi vlak met de plaat.
En de voorkant.
Het aluminium kan zo ook mooi als koelplaat dienen.
En zoals het geheel straks in de WTC komt, ik denk dat het zo mooi past.






")