Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
openpilot info draad
- Topicstarter michel pet
- Startdatum
- Is het een probleem dat het hart van de CC3D 5cm uit het hart van de props gemonteerd wordt? Uiteraard met pijltje de goede kant op.
- Als ik het filmpje van OP bekijk zit er geen trillingdemping tussen het frame en de CC3D.
Ik neem aan dat dit nu ook niet nodig is.
- Twisten jullie de draden naar de motoren of heeft dit geen zin? Zijn ca 20cm.
Ton
- Als ik het filmpje van OP bekijk zit er geen trillingdemping tussen het frame en de CC3D.
Ik neem aan dat dit nu ook niet nodig is.
- Twisten jullie de draden naar de motoren of heeft dit geen zin? Zijn ca 20cm.
Ton
BorisB
Forum veteraan
Nee dat maakt niks uit. Nou ja voor de gyros maakt het niks uit, dus rate mode ga je nergens nooit last van hebben. Voor gyro maakt het niet uit waar die staat als deze maar lijnrecht op je frame is. In atti mode krijg je natuurlijk kleine afwijkingen op de acceleratie meter....maar dat is zo minimaal dat je het niet merkt en dan vooral bij rustiger vliegen.
Laatst bewerkt door een moderator:
BorisB
Forum veteraan
Die autotune van lennie is niet eens zo gek. Je had toch een hele zware quad dacht ik? Dat verklaart denk ik dat die ki's zo groot uitvallen. Het is misschien een tikkeltje hoger dan verwacht, maar zolang het niet oscilleert en je quad houdt goed zijn positie kan het werken. Belangrijkste is hoe het vliegt?
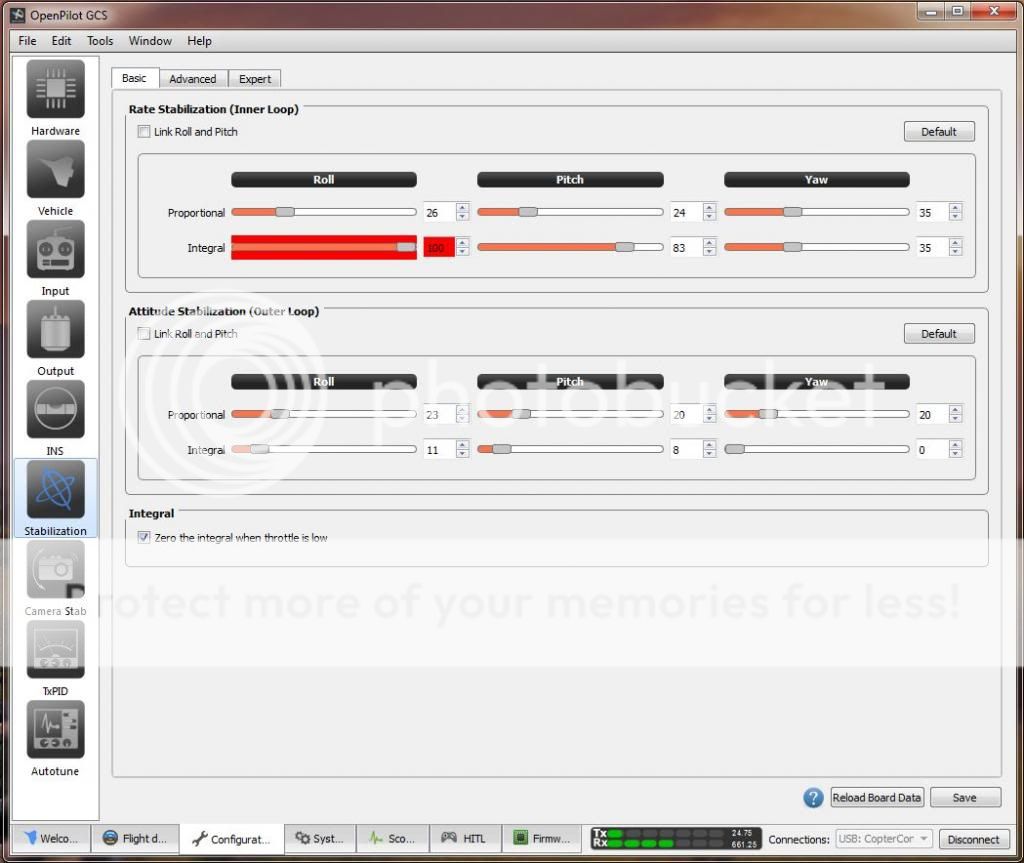
Kan zijn dat die goed vliegt , maar de I waarde staat heel hoog op de roll en de pitch.
En de P waarde staat best laag!
Ik heb bij niemand zo'n hoge I waarde gezien.
Ik kan me vergissen maar de waardes zijn extreem..
Als ik zo naar de waardes zie denk ik dat de autotune toch niet op punt staat , beter manueel instellen.
Beter de I veel lager zetten en de P wat hoger. ( Pitch en roll)
En de P waarde staat best laag!
Ik heb bij niemand zo'n hoge I waarde gezien.
Ik kan me vergissen maar de waardes zijn extreem..
Als ik zo naar de waardes zie denk ik dat de autotune toch niet op punt staat , beter manueel instellen.
Beter de I veel lager zetten en de P wat hoger. ( Pitch en roll)
Die autotune van lennie is niet eens zo gek. Je had toch een hele zware quad dacht ik? Dat verklaart denk ik dat die ki's zo groot uitvallen. Het is misschien een tikkeltje hoger dan verwacht, maar zolang het niet oscilleert en je quad houdt goed zijn positie kan het werken. Belangrijkste is hoe het vliegt?
bordje zit nu op een dji 450 frame. Vliegklaar gewichr is 1050 gram.
ik ga het morgen nog eens proberen, kijken of ik dan weer een zelfde resutaat krijg.
hier een linkje met hoe het werkt, je moet alleen wel de versie van cgs installeren de garbungel gepost heeft:
Autotune Setup - Documentation - OpenPilot Wiki
BorisB
Forum veteraan
Ik zal bij mij ook eens testen. Heb alleen zo weinig tijd deze week.
Maar een te hoge waarde bestaat niet....maar is ook experimenteel deze feature is nog niet in de final versie. Maar handmatig tunen is in principe gewoon kp's verhogen totdat je multi snel begint te oscilleren en vervolgens iets verlagen totdat het verdwijnt. I waarde stel je daarna bij en je verhoogt het net zolang totdat je quad goed zijn positie blijft houden.....te hoge ki's en je multi gaat langzamer oscilleren dan bij te hoge kp's.
D waarde kun je daarna op 1/100 van kp waarde instellen, maar dat doe ik nooit.
In principe zet je de ki's alleen bij de mode waarin je vliegt. Vlieg je voornamelijk rate dan laat je ki's bij atti 0 en andersom.
Maar een te hoge waarde bestaat niet....maar is ook experimenteel deze feature is nog niet in de final versie. Maar handmatig tunen is in principe gewoon kp's verhogen totdat je multi snel begint te oscilleren en vervolgens iets verlagen totdat het verdwijnt. I waarde stel je daarna bij en je verhoogt het net zolang totdat je quad goed zijn positie blijft houden.....te hoge ki's en je multi gaat langzamer oscilleren dan bij te hoge kp's.
D waarde kun je daarna op 1/100 van kp waarde instellen, maar dat doe ik nooit.
In principe zet je de ki's alleen bij de mode waarin je vliegt. Vlieg je voornamelijk rate dan laat je ki's bij atti 0 en andersom.
Ik doe het net andersom , eerst de I verhogen tot die mooi in positie blijft en de quadcopter netjes zen richting houdt.
Dat wilt zeggen dat als je op Rate mode de quadcopter in een hoek stuurt (vooruit, achteruit, links ,rechts ) dat die mooi de hoek behoudt zonder dat die zelf gaat rechtrekken.. (level effect)
Is dat in orde dan begin je met de P , verhogen tot die begint te oscileren en dan de waarde minderen tot het oscileren stopt.
Qua instelling is het min of meer zoals multiwii.
Best instellen als er geen wind is...
Het is net de juiste combi te vinden tussen de P en de I")
Dat wilt zeggen dat als je op Rate mode de quadcopter in een hoek stuurt (vooruit, achteruit, links ,rechts ) dat die mooi de hoek behoudt zonder dat die zelf gaat rechtrekken.. (level effect)
Is dat in orde dan begin je met de P , verhogen tot die begint te oscileren en dan de waarde minderen tot het oscileren stopt.
Qua instelling is het min of meer zoals multiwii.
Best instellen als er geen wind is...
Het is net de juiste combi te vinden tussen de P en de I
zoals garbungel beschrijft is inderdaad precies als bij multiwii. Alleen heb ik daar ook de meest uiteen lopende waardes gezien.. (waardes van 100 op D geloof ik. vloog superstrak voor de een, werke voor geen meter bij een ander..)
Ik heb nu weer de orginele waardes, kan ik het morgen weer proberen. kijken of ik het gelijk kan filmen..
Ik heb nu weer de orginele waardes, kan ik het morgen weer proberen. kijken of ik het gelijk kan filmen..
heb je de ontvanger goed aangesloten? hier kun je het nakijken..
CopterControl Hardware Manual - Documentation - OpenPilot Wiki
CopterControl Hardware Manual - Documentation - OpenPilot Wiki
Eerst en vooral , moeten de signaal kabels juist aangesloten worden.
Ten 2de moet je de kanalen toewijzen...
Dan kan je verder
http://wiki.openpilot.org/display/Doc/Receiver+Setup
Ten 2de moet je de kanalen toewijzen...
Dan kan je verder
http://wiki.openpilot.org/display/Doc/Receiver+Setup
Vandaag na lang wachten tot het eindelijk eens droog werd, m'n zoontje een camera in z'n handen geduwd en naar buiten gegaan. het resultaat:
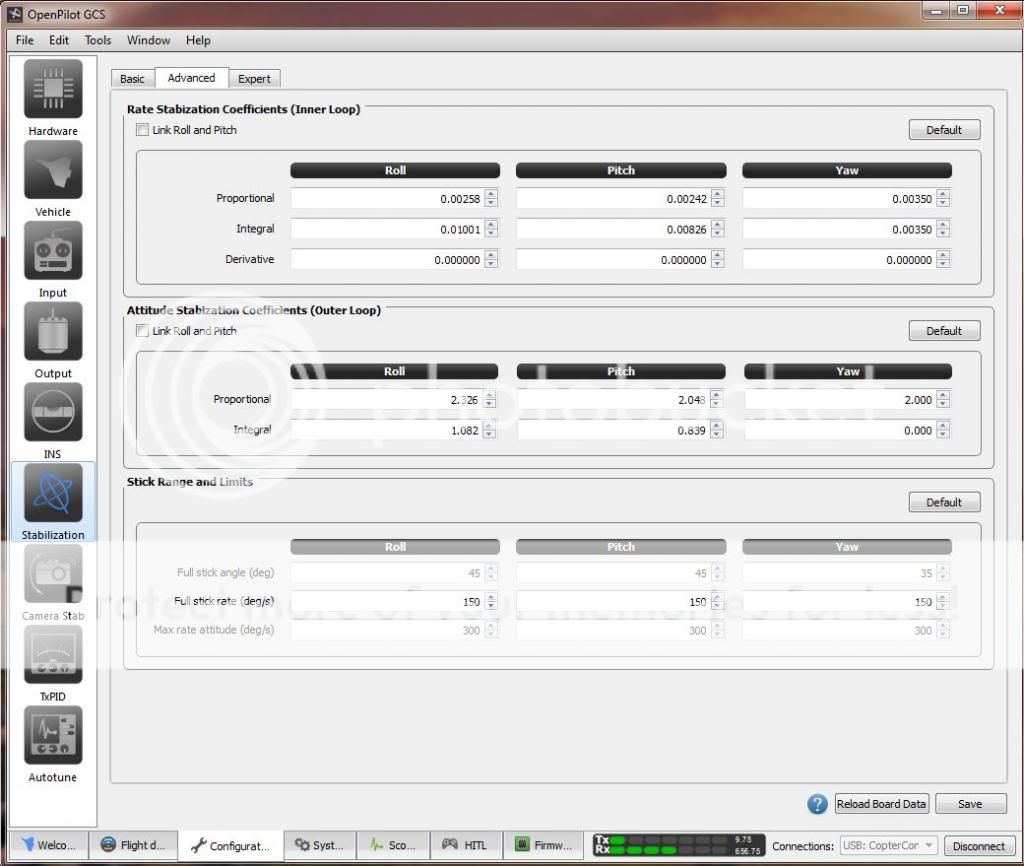
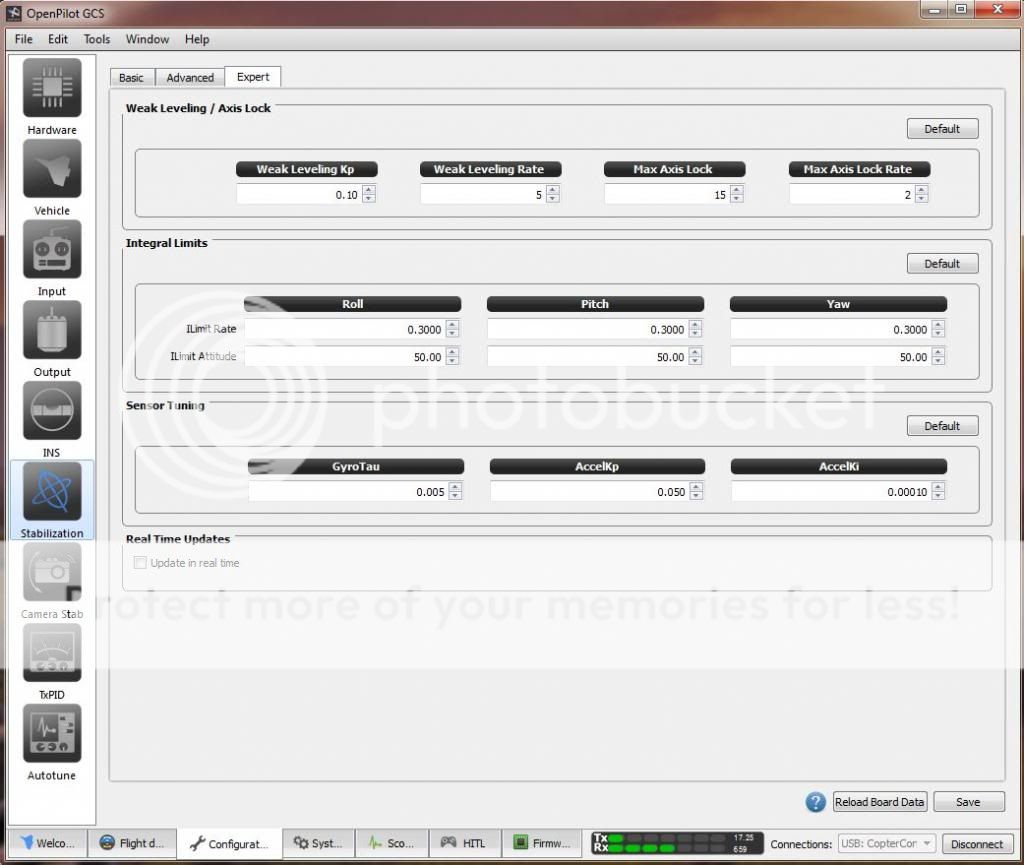
Dit leverde alleen nog veel vreemdere waardes op, ondanks dat ie weer erg stabiel is na het autotunen.. Toch maar handmatig doen denk ik..
http://s576.photobucket.com/albums/ss204/lennie054/?action=view¤t=openpilotstabsettingsbasicretest.jpg
http://s576.photobucket.com/albums/ss204/lennie054/?action=view¤t=openpilotstabsettingsadvancedretest.jpg
http://s576.photobucket.com/albums/ss204/lennie054/?action=view¤t=openpilotstabsettingsexpertretest.jpg
Dit leverde alleen nog veel vreemdere waardes op, ondanks dat ie weer erg stabiel is na het autotunen.. Toch maar handmatig doen denk ik..
http://s576.photobucket.com/albums/ss204/lennie054/?action=view¤t=openpilotstabsettingsbasicretest.jpg
http://s576.photobucket.com/albums/ss204/lennie054/?action=view¤t=openpilotstabsettingsadvancedretest.jpg
http://s576.photobucket.com/albums/ss204/lennie054/?action=view¤t=openpilotstabsettingsexpertretest.jpg
Laatst bewerkt door een moderator:
")