Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Bouwverslag Gry Maritha
- Topicstarter JaFa
- Startdatum
Ondertussen heb ik niet stilgezeten, de EXM2 module is geïnstalleerd en ik heb me de laatste dagen hiermee wat bezig gehouden.
Lang verhaal kort ik kwam tot de conclusie dat ik nog heel wat had te doen en ben dan maar beginnen te solderen en functie per functie in orde gemaakt.
Wat werkt nu?
Wel ondertussen kan ik zeggen dat de 16 functies van de voorcabine & bridge werken:
- NAV licht onder (cabine achtersteven en toplicht)
- NAV licht boven (beiden onafhankelijk)
- Radar klein boven
- Radar groot onder (simultaan gaat de verlichting in het radarscherm aan in de Bridge voor beide radars, hier zie je echter weinig van )
)
- 2x Rood licht onder (anker of beperkte beweegbaarheid)
- 2x Rood licht boven (redundancy)
- 2x wit licht onder (waarom???)
- 2x wit licht boven (redundancy) misschien iemand die het hier weet waarom staan er 4 lichten op die mast?
- SAR licht + 360° rotatie
- Fire monitor 180° rotatie + proportioneel spuiten
- Ankerdek verlichting
- Achterdek schijnwerper
- Bridge intern licht
- Instrumentatie achtergrond licht
- SIL licht op het instrumentatie bord (alles werkt onafhankelijk, geeft heel wat oplichting opties)
- TL lichten met TL start simulatie rond de cabine
- TL lichten op het voorste deel van het werkdek
- Bunks verlichting (dit met een aanwezigheid simulator die random lichten in de gang aan en uit doet als ook in de verschillende vertrekken)
Dit consumeert reeds 4 kanalen
Een fotootje van de werken:


Eigenlijk kan de cabine en brug nu worden samengevoegd met de romp, een deel van de reling loopt door van het een naar het ander dus het is later niet de bedoeling om dit elke keer terug open te maken daar er dan schade aan lak kan optreden.
Nu de batterijen, en de electronica zitten onder de cargo luiken dus in principe is dit niet meer nodig... Toch ga ik hiermee nog even wachten tot mijn anker installatie volledig zijn geprogrammeerd in de USM (met geluid dus).
Daarna heb ik de EXM2 op de USM geïnstalleerd en uren getest.
Wat zit er nu al extra op:
- De zijlift die in de het zijluik zit, kan nu volledig met geluid functioneren de geluiden moeten nog worden "gecorrigeerd" in lengte om volledig synchroon te lopen met de beweging maar dit doe ik wel tijdens het werk (nu is het vakantie ) maar de functie werkt.
) maar de functie werkt.
- De ankers zijn aangesloten en werken proportioneel met geluid, ook dat geluid moet nog worden getrimd (ik wil 2 verschillende geluiden links en rechts)
- Dan ben ik uren bezig geweest met de motor startup van de CAT de rechter motor, om dit te synchroniseren met de "schouw" uitstoot.
het resultaat is eigenlijk bevredigend, eerst start er een elektrische generator (voor de startstroom), dan wordt de aanjager elektrisch aangedreven, de motor voorverwarmt (dit is duidelijk te horen) en dan start de start motor tot idle... De rook evolutie gaat mee eerst niets zodra de aanjager draait en er preheating is is er lichte rook vorming dan tijdens de startup komt er veel te veel uit om vervolgens naar idle te gaan...
Veel woorden kijk zelf maar ( de rook is door het kunstlicht en de "gele" Osb niet altijd goed te zien, opletten dus ):
):
Morgen probeer ik waarschijnlijk de ankers min of meer in orde te krijgen, dit wil zeggen de mechanisch beweging timen, op, neer, enz (alle snelheden zijn anders (traag naar boven snel naar onder)
Dan misschien sound files maken (hier kruipt veeeeel tijd in).
En dan testen (om tot de conclusie te komen dat het toch weer anders moet hahaha)
hahaha)
Hopelijk vinden jullie het tof.
Lang verhaal kort ik kwam tot de conclusie dat ik nog heel wat had te doen en ben dan maar beginnen te solderen en functie per functie in orde gemaakt.
Wat werkt nu?
Wel ondertussen kan ik zeggen dat de 16 functies van de voorcabine & bridge werken:
- NAV licht onder (cabine achtersteven en toplicht)
- NAV licht boven (beiden onafhankelijk)
- Radar klein boven
- Radar groot onder (simultaan gaat de verlichting in het radarscherm aan in de Bridge voor beide radars, hier zie je echter weinig van
)- 2x Rood licht onder (anker of beperkte beweegbaarheid)
- 2x Rood licht boven (redundancy)
- 2x wit licht onder (waarom???)
- 2x wit licht boven (redundancy) misschien iemand die het hier weet waarom staan er 4 lichten op die mast?
- SAR licht + 360° rotatie
- Fire monitor 180° rotatie + proportioneel spuiten
- Ankerdek verlichting
- Achterdek schijnwerper
- Bridge intern licht
- Instrumentatie achtergrond licht
- SIL licht op het instrumentatie bord (alles werkt onafhankelijk, geeft heel wat oplichting opties)
- TL lichten met TL start simulatie rond de cabine
- TL lichten op het voorste deel van het werkdek
- Bunks verlichting (dit met een aanwezigheid simulator die random lichten in de gang aan en uit doet als ook in de verschillende vertrekken)
Dit consumeert reeds 4 kanalen
Een fotootje van de werken:


Eigenlijk kan de cabine en brug nu worden samengevoegd met de romp, een deel van de reling loopt door van het een naar het ander dus het is later niet de bedoeling om dit elke keer terug open te maken daar er dan schade aan lak kan optreden.
Nu de batterijen, en de electronica zitten onder de cargo luiken dus in principe is dit niet meer nodig... Toch ga ik hiermee nog even wachten tot mijn anker installatie volledig zijn geprogrammeerd in de USM (met geluid dus).
Daarna heb ik de EXM2 op de USM geïnstalleerd en uren getest.
Wat zit er nu al extra op:
- De zijlift die in de het zijluik zit, kan nu volledig met geluid functioneren de geluiden moeten nog worden "gecorrigeerd" in lengte om volledig synchroon te lopen met de beweging maar dit doe ik wel tijdens het werk (nu is het vakantie
) maar de functie werkt.- De ankers zijn aangesloten en werken proportioneel met geluid, ook dat geluid moet nog worden getrimd (ik wil 2 verschillende geluiden links en rechts)
- Dan ben ik uren bezig geweest met de motor startup van de CAT de rechter motor, om dit te synchroniseren met de "schouw" uitstoot.
het resultaat is eigenlijk bevredigend, eerst start er een elektrische generator (voor de startstroom), dan wordt de aanjager elektrisch aangedreven, de motor voorverwarmt (dit is duidelijk te horen) en dan start de start motor tot idle... De rook evolutie gaat mee eerst niets zodra de aanjager draait en er preheating is is er lichte rook vorming dan tijdens de startup komt er veel te veel uit om vervolgens naar idle te gaan...
Veel woorden kijk zelf maar ( de rook is door het kunstlicht en de "gele" Osb niet altijd goed te zien, opletten dus
):Morgen probeer ik waarschijnlijk de ankers min of meer in orde te krijgen, dit wil zeggen de mechanisch beweging timen, op, neer, enz (alle snelheden zijn anders (traag naar boven snel naar onder)
Dan misschien sound files maken (hier kruipt veeeeel tijd in).
En dan testen (om tot de conclusie te komen dat het toch weer anders moet
hahaha)Hopelijk vinden jullie het tof.
Korte update, wel aan de ankers ben ik niet toegekomen, wel heb ik wat gerommeld met de zijlift, ik kwam tot de conclusie dat de "failsave" het systeem dat de lift automatisch laat zakken als de Hatch niet volledig openstaat niet meer werkt, de servo tester die hiervoor geïnstalleerd is heeft er blijkbaar genoeg van.
Dus zal deze ook naar de Arduino verhuizen, zodoende kan ik met wat code deze failsave bekomen: zoiets van
If (hatch = open) then (lift = werkt) else (lift = laag) dit is een simpele versie van wat het moet zijn natuurlijk, straks even testen dat alles doet wat moet...
het voordeel is dan wel dat er enkel een servo kabel naar het techrek loopt zonder al die extra afstellingen er tussen.
Het idee zal zijn Rx signaal naar EXM2 (voor het geluid) dan naar de arduino voor eindstand, snelheid en failsave.
Nu lijkt dit allemaal wat chinees voor sommige maar dat valt reuze mee hoor, ik heb dit ook maar gedaan na wat hulp van Marten77
Voor de geïnteresseerde wil ik wel een uitschrijven hoe dit allemaal gebeurt (mochten die er zijn natuurlijk)
Dus zal deze ook naar de Arduino verhuizen, zodoende kan ik met wat code deze failsave bekomen: zoiets van
If (hatch = open) then (lift = werkt) else (lift = laag) dit is een simpele versie van wat het moet zijn natuurlijk, straks even testen dat alles doet wat moet...
het voordeel is dan wel dat er enkel een servo kabel naar het techrek loopt zonder al die extra afstellingen er tussen.
Het idee zal zijn Rx signaal naar EXM2 (voor het geluid) dan naar de arduino voor eindstand, snelheid en failsave.
Nu lijkt dit allemaal wat chinees voor sommige maar dat valt reuze mee hoor, ik heb dit ook maar gedaan na wat hulp van Marten77
Voor de geïnteresseerde wil ik wel een uitschrijven hoe dit allemaal gebeurt (mochten die er zijn natuurlijk)
Watergeus
Vriend van modelbouwforum.nl
Jafa,
Kan je wat plaatjes van je geschakelde navigatie verlichting plaatsen?
Ik heb het idee dat er iets niet klopt.
Jij benoemt een rode als ankerlicht, die moet wit rondom schijnend zijn.
dan kunne nwe je ook verder helpen met het benoemen van de functies van de andere lichten.
Groet,
Mathieu
Kan je wat plaatjes van je geschakelde navigatie verlichting plaatsen?
Ik heb het idee dat er iets niet klopt.
Jij benoemt een rode als ankerlicht, die moet wit rondom schijnend zijn.
dan kunne nwe je ook verder helpen met het benoemen van de functies van de andere lichten.
Groet,
Mathieu
Jan, Hieronder een link naar het Verlichtingsdraadje op het Forum. Laat naast de functie ook een plaatje van de lichten zien. Werkt veel beter dan alleen maar tekst. Succes met de spaghettiwinkel. Heb zelf ook nog zo'n uitdaging op mijn sleepboot. Navigatieverlichting werkt nog wel, maar de aanvullende verlichting niet. En zoals zo vaak geen schema gemaakt. Een uitdaging dus. Succes met de afbouw van je toch wel complexe schip. Gr. Klaas.
http://www.modelbouwforum.nl/threads/scheeps-verlichting-draadje.135842/
http://www.modelbouwforum.nl/threads/scheeps-verlichting-draadje.135842/
Jan, Hieronder een link naar het Verlichtingsdraadje op het Forum. Laat naast de functie ook een plaatje van de lichten zien. Werkt veel beter dan alleen maar tekst. Succes met de spaghettiwinkel. Heb zelf ook nog zo'n uitdaging op mijn sleepboot. Navigatieverlichting werkt nog wel, maar de aanvullende verlichting niet. En zoals zo vaak geen schema gemaakt. Een uitdaging dus. Succes met de afbouw van je toch wel complexe schip. Gr. Klaas.
http://www.modelbouwforum.nl/threads/scheeps-verlichting-draadje.135842/
Hey K-K, heel ereg bedankt ik kijk het na en zal de nautic1 aanpassen indien nodig, nu voor zo ver ik weet zijn de rode lichten idd niet voor het voor anker gaan maar beperkte doorgang aan een zijde maar ik bestudeer het wel eerst even het zijn tenslotte enkel draadjes versteken, wat heel makkelijk is als je alleen met stekertjes werkt
 (eindelijk is die voorzienigheid iets waard)
(eindelijk is die voorzienigheid iets waard)Tja en die spagetti, als je veel functies en veel licht laat branden hoe dan ook word het moeilijk het geheel "netjes" te houden ook waarschijnlijk omdat je niet jaren van te voren zit te plannen hoe wat en waar, en dan is het maar spaghetti, toch lekker nietwaar

Alleszins bedankt voor de inzichten, dat geld ook voor Watergeus.
Nu net voor eind van het weekend (en het einde van mijn vakantie) is er toch uiteindelijk wat gebeurd.
Ik heb me de laatste 3 dagen geconcentreerd op de side hatch en de cargo lift binnenin, origineel ontworpen, werkte deze met afstel limiters, en HKservo speed controlers. Als je met een F14 basis zender werkt kan je die dingen niet instellen, maar je hebt wel een ton kanalen...
Zoals je reeds kon lezen ontstond er een probleem tussen dit systeem en mij, met de enige optie het te slopen...
Wel na wat werk, programeren en testen (vooral testen en weer proberen en testen en...) werkt het geheel.
Hoe en wat, wel de lift houd rekening met de positie van de hatch, gaat deze omlaag, de lift ook, gaat deze over een bepaald punt (openings envelop) kan de lift vrij bewegen. Op dit moment is dat ingesteld op zo'n 25% voor totale opening, dit geeft het beste resultaat.
Waarschijnlijk gaat de lift snelheid nog wat omlaag al zit ik daar op de "stotter" limiet van de servo er kan nog een 10% verder af maar dan begint hij wat te schokken.
Nu buiten de technische kant wat houd dit allemaal in:
(Misschien hebben jullie hier ook wel iets aan mocht er nog mensen modelbouw te VER willen drijven )
)
Timen van de opwaartse slag van de lift, de neerwaardse, de tussenstanden en dan de synchronisatie van de geluiden...
Timing:
Dan worden de soundfiles gemaakt, voor je dit kan doen neem je deze eerst op, met of smartphone als je het 1/1 model hebt anders vraag je een "crewmember" dit te doen, of je zoekt iets leuks op op iNet...
Ik moet jullie niet uitleggen dat hierin wel veel tijd kruipt, je moet vaak de geluiden opschonen van parasiet "noise" maar uiteindelijk heb je geluidsfragmenten die ik, gewoon op het gehoor heb samen gezet.
Dan heb je dus gesynchroniseerde files die ik vervolgens in de USM/EXM2 heb opgeladen op deze manier:
Makkelijk niet
Nu al het voorgaande is er enkel om een resultaat te bekomen natuurlijk!
Eerlijk ik vind het best ok, het werkt mooi, geleidelijk en de sound maakt het voor mij meer dan af, het enige wat waarschijnlijk nog gaat worden aangepast is het feit dat de lift nog iets langzamer zal worden, maar gezien dit opnieuw soundfiles maken als gevolg heeft is dat voor vanavond pas... (de lift doet er nu 9s over en dit gaat naar 14s, net iets mooier maar dat is persoonlijk)
Bij deze:
De timing van de hatch is nog 1sec off maar ook dat pas ik deze avond aan...
Laat maar weten of jullie het wat vinden, fijn weekend allemaal
Ik heb me de laatste 3 dagen geconcentreerd op de side hatch en de cargo lift binnenin, origineel ontworpen, werkte deze met afstel limiters, en HKservo speed controlers. Als je met een F14 basis zender werkt kan je die dingen niet instellen, maar je hebt wel een ton kanalen...
Zoals je reeds kon lezen ontstond er een probleem tussen dit systeem en mij, met de enige optie het te slopen...
Wel na wat werk, programeren en testen (vooral testen en weer proberen en testen en...) werkt het geheel.
Hoe en wat, wel de lift houd rekening met de positie van de hatch, gaat deze omlaag, de lift ook, gaat deze over een bepaald punt (openings envelop) kan de lift vrij bewegen. Op dit moment is dat ingesteld op zo'n 25% voor totale opening, dit geeft het beste resultaat.
Waarschijnlijk gaat de lift snelheid nog wat omlaag al zit ik daar op de "stotter" limiet van de servo er kan nog een 10% verder af maar dan begint hij wat te schokken.
Nu buiten de technische kant wat houd dit allemaal in:
(Misschien hebben jullie hier ook wel iets aan mocht er nog mensen modelbouw te VER willen drijven
)Timen van de opwaartse slag van de lift, de neerwaardse, de tussenstanden en dan de synchronisatie van de geluiden...
Timing:
Dan worden de soundfiles gemaakt, voor je dit kan doen neem je deze eerst op, met of smartphone als je het 1/1 model hebt anders vraag je een "crewmember" dit te doen, of je zoekt iets leuks op op iNet...
Ik moet jullie niet uitleggen dat hierin wel veel tijd kruipt, je moet vaak de geluiden opschonen van parasiet "noise" maar uiteindelijk heb je geluidsfragmenten die ik, gewoon op het gehoor heb samen gezet.
Dan heb je dus gesynchroniseerde files die ik vervolgens in de USM/EXM2 heb opgeladen op deze manier:
Makkelijk niet
Nu al het voorgaande is er enkel om een resultaat te bekomen natuurlijk!
Eerlijk ik vind het best ok, het werkt mooi, geleidelijk en de sound maakt het voor mij meer dan af, het enige wat waarschijnlijk nog gaat worden aangepast is het feit dat de lift nog iets langzamer zal worden, maar gezien dit opnieuw soundfiles maken als gevolg heeft is dat voor vanavond pas... (de lift doet er nu 9s over en dit gaat naar 14s, net iets mooier maar dat is persoonlijk)
Bij deze:
De timing van de hatch is nog 1sec off maar ook dat pas ik deze avond aan...
Laat maar weten of jullie het wat vinden, fijn weekend allemaal
Ondertussen zijn de sound-tijden en bewegingen volledig aangepast, en deze laatste video hiervan wil ik jullie toch ook niet onthouden:
Uiteindelijk zit er erg veel tijd in deze extra "sound" feature maar het komt het realisme wel ten goede vind ik.
Morgen begin ik aan de synchronisatie van de ankers, deze werken goed rechtstreeks op de Multiprops zonder tussenkomst van de USM maar tijdens het testen kwam ik tot de conclusie dat ze niet werken als deze er tussen zit, toch niet met de doorlus functie.
Morgen probeer ik dit nog eens met een Y servo kabel, maar ik vrees dat ik uiteindelijke toch ook de arduino ga moeten aanspreken dit te controleren.
Wat wil ik bekomen:
- Anker volledig op (met bijpassend ophaal geluid)
- Anker net uit de kluis (idem maar zonder het in intrekken in de ankerbuis)
- Anker volledig neer (met valgeluid)
- Anker proportioneel regelbaar tussen volledig neer en de hangpositie (dit met gewoon traag ankerketting geratel)
Ik vrees dat dit weer een 3 tal weken werk wordt
Uiteindelijk zit er erg veel tijd in deze extra "sound" feature maar het komt het realisme wel ten goede vind ik.
Morgen begin ik aan de synchronisatie van de ankers, deze werken goed rechtstreeks op de Multiprops zonder tussenkomst van de USM maar tijdens het testen kwam ik tot de conclusie dat ze niet werken als deze er tussen zit, toch niet met de doorlus functie.
Morgen probeer ik dit nog eens met een Y servo kabel, maar ik vrees dat ik uiteindelijke toch ook de arduino ga moeten aanspreken dit te controleren.
Wat wil ik bekomen:
- Anker volledig op (met bijpassend ophaal geluid)
- Anker net uit de kluis (idem maar zonder het in intrekken in de ankerbuis)
- Anker volledig neer (met valgeluid)
- Anker proportioneel regelbaar tussen volledig neer en de hangpositie (dit met gewoon traag ankerketting geratel)
Ik vrees dat dit weer een 3 tal weken werk wordt

") pff op deze manier lijkt het wel werken, daar moet ook alles snel snel ,
pff op deze manier lijkt het wel werken, daar moet ook alles snel snel ,Wel ik denk goed nieuws te hebben, de servo's lijken te werken op de Arduino code zoals ik het wenste, nu eens zien wat ik nog met dat geluid kan doen.
Ik ga eens kijken of een servoRead met feedback op die laatste ingang geen optie is met een "Loop" geluid naast de 2 vaste punten, ik kan natuurlijk ook de hoofd luiken direct sturen uit de USM, en dan heb ik de feedback naar de externe ingangen van de USM vrij...
Ik denk dat het dat laatste gaat worden, met een proportionele opening van de luiken, naast 2 vaste punten, zo blijven we bezig
 nu die code bestaat al is enkel een kwestie van kopiëren en verifiëren.
nu die code bestaat al is enkel een kwestie van kopiëren en verifiëren. Ik modder vanavond nog wel wat aan... (echt heel leuk vind ik dit wel niet...)
Watergeus
Vriend van modelbouwforum.nl
JaFa,
Weer mooie resultaten, met de opvolgende nieuwe uitdagingen uiteraard.
Eerder sprak je over het 'jutteren' van servo's bij het inschakelen van de spanning, was dit al opgelost of speelt dat nog steeds?
Was dit ook aan de orde met de winch servo's voor de ankers?
Ik denk er aan om zo'n zelfde servo voor een anker te gebruiken maar ben er een beetje huiverig voor als die beweging er bij het aanzetten nog in zit.
Lijkt me dat dit de levensduur van de servo niet ten goede als het anker thuis is.
En wat de tijdsdruk betreft, hebben we denk ik allemaal last van. Voornamelijk van de zelf opgelegde planning.
Verder
Groet,
Mathieu
Weer mooie resultaten, met de opvolgende nieuwe uitdagingen uiteraard.
Eerder sprak je over het 'jutteren' van servo's bij het inschakelen van de spanning, was dit al opgelost of speelt dat nog steeds?
Was dit ook aan de orde met de winch servo's voor de ankers?
Ik denk er aan om zo'n zelfde servo voor een anker te gebruiken maar ben er een beetje huiverig voor als die beweging er bij het aanzetten nog in zit.
Lijkt me dat dit de levensduur van de servo niet ten goede als het anker thuis is.
En wat de tijdsdruk betreft, hebben we denk ik allemaal last van
. Voornamelijk van de zelf opgelegde planning.Verder
Groet,
Mathieu
Bedankt voor de fijne commentaren, het lijkt of de laatste weken er eigenlijk niet veel gebeurd, toch zit ik gemiddeld zo'n 3 uur tot 5 uur per dag de dingen in orde te brengen, veelal achter de computer om te fine tunen, ook het aanleren van de USM en de vele trial and error pogingen om de sounds net dat te laten doen wat jij wil vergt uren en uren tijd...
Wel het techrek heeft een volledige makeover gekregen, wat wil dat zeggen wel heel veel draden zijn verdwenen, ik heb alles met lintkabels, gedaan met respect voor de kleuren deze keer, het zou voor derden zowat onmogelijk geworden zijn om ooit iets met de boot te doen op de manier zoals het was...
Nu is er een goede "simple" logica van de multiprops naar de USM en verder naar de Arduino... (je kan op volgen op volgende tekening)
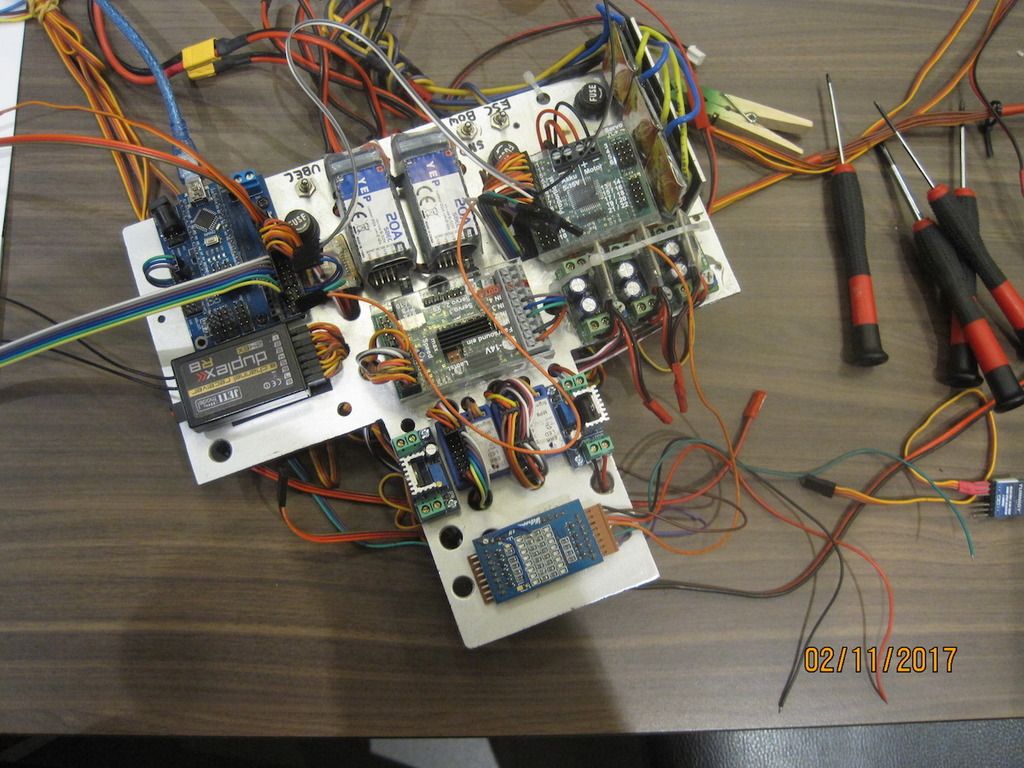
Morgen moet ik 1 van de 3 schakelaars vervangen ik merkte al een aantal keer op dat deze een fout contact durft geven...
Dan het volgende grote werk, de ankers, uitgevoerd met lier servo's, werkten met vertragers (HK) en positiebepalers, allemaal electronisch.
Dit was ok maar niet 100% naar wens (waarschijnlijk ben ik een moeilijke mens).
Ik had reeds geprobeerd om de winches te sturen met de USM maar dat ging helemaal niet, vreemd want een soortgelijke winch werkte wel.
Uiteindelijk ben ik erachter gekomen dat de USM een probleem heeft met de vertragers.
Lang verhaal kort gemaakt, vertragers en afstellers eruit gesloopt, ankerwinch terug eruit, alles terug los solderen en dan met wat verleng kabels naar de Arduino.
Dan wat getest, code geschreven, getest, herschreven, getest, herschreven, tot de conclusie gekomen dat er iets fout was in de zijlift code, dat opgelost
vervolgens de zijlift van de volledig juiste sound voorzien, zowel in volledige loop als in proportionele... (dat heeft 2 weken geduurd voor dat ik dat klaar kreeg) nu door al dit coden en spelen met de USM, weet ik nu wel hoe ik alle functies min of meer in orde krijg zonder te veel moeten te moeten testen en hertesten.
De hoofd luiken lopen nu ook niet meer van arduino naar USM maar omgekeerd, dit geeft mij heel wat extra sound mogelijkheden, en ik heb nu terug alle externe ingangen vrij... (eigenlijk hoop ik dat jullie nog kunnen volgen maar ik realiseer mij dat het misschien allemaal wat chinees kan klinken)
Morgen pas ik de code nog aan zodat deze van positie naar positie kunnen lopen maar ook proportioneel kunnen bewegen, dat geeft dan volledige vrijheid. Er moet ook nog een failsave worden geschreven voor het conflict als de side hatch open staat. Waarschijnlijk ga ik het simpel houden hier,
als de zijhatch niet in close-positie staat mag de fronthatch niet bewegen... Voor de kraan moet een soortgelijke geschreven worden omdat deze over de luiken draait met het opstapje en de cabine, maar dat zal wel lukken.
Nu het "bewegings" resultaat van de ankers maar dan met de Arduino, het meeste werkt, het enige waar ik misschien nog moet aan sleutelen is het docken van de linker anker, deze valt net iets te schuin (maar ik zie niet echt waarom als jullie het weten uit ervaring of zo?) nu het is ver van een ramp maar net geen 100% kijk zelf maar even:
Dit was vooral het afstellen van de "Uppositie" en het net uit de kluis hangen, je ziet dat de linker niet 100% docked . Dan de snelheden meten,deze moeten nog een beetje worden gecorrigeerd op de linker.
. Dan de snelheden meten,deze moeten nog een beetje worden gecorrigeerd op de linker.
Dan een voorbeeldje van het rechter anker.:
3 vaste posities nl. op, hangen, en neer, tussen hangen en neer gaat het proportioneel. de snelheid is traag omhoog, en tijdens het "uitkluizen" en de proportionele loop, het vallen is de maximum van de winch, neer 5s op 40s... Docking 9s, uitkluizen 6s. Met deze data kan ik naar hartelust soundfiles gaan compileren...
Nog eentje na de afstelling:
Dit was weer een overzichtje van de laatste dagen, hopelijk is het wat...
Wel het techrek heeft een volledige makeover gekregen, wat wil dat zeggen wel heel veel draden zijn verdwenen, ik heb alles met lintkabels, gedaan met respect voor de kleuren deze keer, het zou voor derden zowat onmogelijk geworden zijn om ooit iets met de boot te doen op de manier zoals het was...
Nu is er een goede "simple" logica van de multiprops naar de USM en verder naar de Arduino... (je kan op volgen op volgende tekening)

Morgen moet ik 1 van de 3 schakelaars vervangen ik merkte al een aantal keer op dat deze een fout contact durft geven...
Dan het volgende grote werk, de ankers, uitgevoerd met lier servo's, werkten met vertragers (HK) en positiebepalers, allemaal electronisch.
Dit was ok maar niet 100% naar wens (waarschijnlijk ben ik een moeilijke mens
).Ik had reeds geprobeerd om de winches te sturen met de USM maar dat ging helemaal niet, vreemd want een soortgelijke winch werkte wel.
Uiteindelijk ben ik erachter gekomen dat de USM een probleem heeft met de vertragers.
Lang verhaal kort gemaakt, vertragers en afstellers eruit gesloopt, ankerwinch terug eruit, alles terug los solderen en dan met wat verleng kabels naar de Arduino.
Dan wat getest, code geschreven, getest, herschreven, getest, herschreven, tot de conclusie gekomen dat er iets fout was in de zijlift code, dat opgelost
vervolgens de zijlift van de volledig juiste sound voorzien, zowel in volledige loop als in proportionele... (dat heeft 2 weken geduurd voor dat ik dat klaar kreeg) nu door al dit coden en spelen met de USM, weet ik nu wel hoe ik alle functies min of meer in orde krijg zonder te veel moeten te moeten testen en hertesten.
De hoofd luiken lopen nu ook niet meer van arduino naar USM maar omgekeerd, dit geeft mij heel wat extra sound mogelijkheden, en ik heb nu terug alle externe ingangen vrij... (eigenlijk hoop ik dat jullie nog kunnen volgen maar ik realiseer mij dat het misschien allemaal wat chinees kan klinken)
Morgen pas ik de code nog aan zodat deze van positie naar positie kunnen lopen maar ook proportioneel kunnen bewegen, dat geeft dan volledige vrijheid. Er moet ook nog een failsave worden geschreven voor het conflict als de side hatch open staat. Waarschijnlijk ga ik het simpel houden hier,
als de zijhatch niet in close-positie staat mag de fronthatch niet bewegen... Voor de kraan moet een soortgelijke geschreven worden omdat deze over de luiken draait met het opstapje en de cabine, maar dat zal wel lukken.
Nu het "bewegings" resultaat van de ankers maar dan met de Arduino, het meeste werkt, het enige waar ik misschien nog moet aan sleutelen is het docken van de linker anker, deze valt net iets te schuin (maar ik zie niet echt waarom als jullie het weten uit ervaring of zo?) nu het is ver van een ramp maar net geen 100% kijk zelf maar even:
Dit was vooral het afstellen van de "Uppositie" en het net uit de kluis hangen, je ziet dat de linker niet 100% docked
. Dan de snelheden meten,deze moeten nog een beetje worden gecorrigeerd op de linker.Dan een voorbeeldje van het rechter anker.:
3 vaste posities nl. op, hangen, en neer, tussen hangen en neer gaat het proportioneel. de snelheid is traag omhoog, en tijdens het "uitkluizen" en de proportionele loop, het vallen is de maximum van de winch, neer 5s op 40s... Docking 9s, uitkluizen 6s. Met deze data kan ik naar hartelust soundfiles gaan compileren...
Nog eentje na de afstelling:
Dit was weer een overzichtje van de laatste dagen, hopelijk is het wat...
Laatst bewerkt:
JaFa,
Weer mooie resultaten, met de opvolgende nieuwe uitdagingen uiteraard.
Eerder sprak je over het 'jutteren' van servo's bij het inschakelen van de spanning, was dit al opgelost of speelt dat nog steeds?
Was dit ook aan de orde met de winch servo's voor de ankers?
Ik denk er aan om zo'n zelfde servo voor een anker te gebruiken maar ben er een beetje huiverig voor als die beweging er bij het aanzetten nog in zit.
Lijkt me dat dit de levensduur van de servo niet ten goede als het anker thuis is.
En wat de tijdsdruk betreft, hebben we denk ik allemaal last van
Verder
Groet,
Mathieu
Ja dat "Jutteren", het is niet echt Jutteren of Jitteren, maar het probleem bij veel van deze winch servo's is dat tijdens de opstart deze de "potmeter" center opzoeken, enkel de dure digitalen hebben dat niet. dus tijdens de opstart gaan ze even "springen" nu wat is veel, de hatch aan de zijkant heeft dit ook, en ik zie bij menig mensen hetzelfde gebeuren als ze hun boot opstarten. Ik heb al vanalles geprobeerd het enige wat een beetje dit doet verminderen is de Neutraal (min spanning) wat rustiger laten opkomen maar ook niet voor alle servo's.
Vele mensen kennen dit probleem waarschijnlijk maar op al deze extra functies kan dat wel eens lastig zijn, nu om op te starten moeten toch alle kanalen gecentreerd zijn, ook voor de USM anders zijn er fouten. Tja een complexe boot komt waarschijnlijk met wat procedures.
Nu de winch gaat steeds naar zijn neutrale positie he, het anker op, daar gaat hij nooit voorbij! Hij valt een 5 cm bij de opstart, en dan gaat hij bij mij naar de hang positie, dan zie ik zelf of ik hem inneem of laat hangen.
Mocht je nog extra info nodig hebben hoor ik het wel,
Doei
Watergeus
Vriend van modelbouwforum.nl
Helder weer.
Ik ga het wel uitvinden, bij mij zal de aansturing "conventioneel" direct via de ontvanger aangestuurd worden.
Een veerconstructie in de eindstand (anker thuis) zal een mogelijke overbelasting kunnen beperken.
Ik zou niet veranderen in de snelheid van het BB anker. In de werkelijkheid zal er altijd wat verschil in snelheid door diverse oorzaken zoals gebruik en staat van onderhoud.
Ankers komen over het algemeen niet iedere keer in exact de zelfde stand terug in de kluis dus ook daar zou ik het lekker laten voor wat het is, als een anker verkeerd valt kan ze met het binnen halen zelfs verkeerd om thuis komen. Met de punten van de vloeien omlaag.
Schippers en stuurlieden zijn hier niet zo blij mee want dan kan het anker weer een heel eind terug naar beneden om de slag eruit te halen.
Het klinkt in ieder geval als de laatste loodjes, succes.
Groet,
Mathieu
Ik ga het wel uitvinden, bij mij zal de aansturing "conventioneel" direct via de ontvanger aangestuurd worden.
Een veerconstructie in de eindstand (anker thuis) zal een mogelijke overbelasting kunnen beperken.
Ik zou niet veranderen in de snelheid van het BB anker. In de werkelijkheid zal er altijd wat verschil in snelheid door diverse oorzaken zoals gebruik en staat van onderhoud.
Ankers komen over het algemeen niet iedere keer in exact de zelfde stand terug in de kluis dus ook daar zou ik het lekker laten voor wat het is, als een anker verkeerd valt kan ze met het binnen halen zelfs verkeerd om thuis komen. Met de punten van de vloeien omlaag.
Schippers en stuurlieden zijn hier niet zo blij mee want dan kan het anker weer een heel eind terug naar beneden om de slag eruit te halen.
Het klinkt in ieder geval als de laatste loodjes, succes.
Groet,
Mathieu
Bedankt Mathieu, dus het probleem van het fout docken is niet enkel modelbouw gerelateerd?
Ik had in de kluis"buis" een positioneer pal gestoken maar de helft daarvan is afgebroken, dat is de reden dat het anker soms scheef valt, ik probeer dit toch nog te richten.
Vanavond houd ik me waarschijnlijk bezig met geluiden, mochten er mensen geïnteresseerd zijn schrijf ik dit wel eens uit, het heeft meer met computer dan met modelbouw te maken natuurlijk.
En misschien de hoofdluiken nog eens aanpassen, (proportioneel en de failsave)
Ik had in de kluis"buis" een positioneer pal gestoken maar de helft daarvan is afgebroken, dat is de reden dat het anker soms scheef valt, ik probeer dit toch nog te richten.
Vanavond houd ik me waarschijnlijk bezig met geluiden, mochten er mensen geïnteresseerd zijn schrijf ik dit wel eens uit, het heeft meer met computer dan met modelbouw te maken natuurlijk.
En misschien de hoofdluiken nog eens aanpassen, (proportioneel en de failsave)
Ondertussen is er weer wat werk verzet, de ankers zijn zo goed als klaar, het is niet helemaal 100% maar je botst overal op beperkingen...
Wat werkt:
- Anker valt (met sound)
- Anker op (met sound)
- Anker van hangen in kluis (met sound)
- Anker van in kluis naar hangen (met sound)
- Anker van hangen naar vallen (met sound)
Wat niet, de anker is tussen hangen en vallen proportioneel maar hier krijg ik geen sound in (op dit moment)
Dit alles voor het rechter anker.
Het linker heb ik moeten demonteren omdat er mechanisch iets moest worden aangepast aan de kluis, dit werkt weer, ik moet enkel nog de pot van de servo eens open vijzen en verdraaien zodat hij iets trager dockt, hij dockt wel terug mooi maar iets te snel naar mijn gevoel.
De sounds zijn aangepast en moeten nog even worden getrimmed, ze zijn anders van pitch, diepte enz... (ander geluid dus) nu dit moet nog worden gedaan...
We geraken er wel al is het een werk van lange adem... (niet altijd heel leuk)
Genoeg gepraat, hier een filmpje:
Nog wat test film materiaal, voor de fans: hier moest links en rechts wat worden aangepast...
Misschien doe het linker anker vandaag nog voor ik weer werken moet, anders is het na het weekend vrees ik...
Wat werkt:
- Anker valt (met sound)
- Anker op (met sound)
- Anker van hangen in kluis (met sound)
- Anker van in kluis naar hangen (met sound)
- Anker van hangen naar vallen (met sound)
Wat niet, de anker is tussen hangen en vallen proportioneel maar hier krijg ik geen sound in (op dit moment)
Dit alles voor het rechter anker.
Het linker heb ik moeten demonteren omdat er mechanisch iets moest worden aangepast aan de kluis, dit werkt weer, ik moet enkel nog de pot van de servo eens open vijzen en verdraaien zodat hij iets trager dockt, hij dockt wel terug mooi maar iets te snel naar mijn gevoel.
De sounds zijn aangepast en moeten nog even worden getrimmed, ze zijn anders van pitch, diepte enz... (ander geluid dus) nu dit moet nog worden gedaan...
We geraken er wel al is het een werk van lange adem... (niet altijd heel leuk)
Genoeg gepraat, hier een filmpje:
Nog wat test film materiaal, voor de fans: hier moest links en rechts wat worden aangepast...
Misschien doe het linker anker vandaag nog voor ik weer werken moet, anders is het na het weekend vrees ik...