Goeden Avond.
Zoals beloofd in dit draadje, begin ik hier een klein bouwberichtje van mijn Tarot Ironman 1000.
Ik ga er op m’n gemak mee beginnen en ik heb geen haast.
De Iromnan 1000 ga ik alleen maar voor de fun vliegen.
Het wordt geen foto-drone maar meer een platform voor diverse experimenten.
Meer zal ik hier nog niet verklappen....")
Ik ben geen professionele bouwer, maar ik hou wel van perfectie.
Ik probeer dus zo mooi mogelijk te bouwen, maar doe dat wel in een rustig tempo.
Verwacht dus geen wonderen van mij.
Als jullie iets zien wat sub-optimaal is, dan vertel het mij A.U.B.
Ik heb altijd een oor open voor de meer ervarene modelbouwers.
Van jullie kan ik nog veel leren!
Ik vlieg sinds een paar jaar diverse zweefvliegtuigen en een paar motor vliegtuigen.
Begin dit jaar heb ik voor de fun een DJI Phantom gekocht en ik was er meteen weg van.
Alleen de „speelgoed zender“ beviel me niet dus was de Phantom weer snel verkocht.
Ik heb toen zelf m’n eerste multi-rotor (op)gebouwd.
Een DJI F550 met alle toeters en bellen.
De Tarot Ironman 1000 gaat nu mijn DJI F550 vervangen.
De volgende componenten ga ik verbouwen.
- Tarot Ironman 1000 Frame
- 8x Tiger Motors MN3515-15 met 400kv
- 8 x Turnigy Plush 40A regelaars
- 2 x Power Distribution Board
- 8 x RCTimer 15 x 7.5 CFK propellers
- 1 x DJI Naza-M v2 met GPS
- 1 x DJI BTU Bluetooth modul
- 1 x Jeti R10 ontvanger
- 1 x UniSens-E 5.5mm Telemetrie sensor
- 2 x SLS APL 5s 5000mAh 30+ Lipo (als 5s 10000mAh)
- Diverse kabeltjes, stekkers, verlichting etc... etc...
Een paar dingetjes zijn er nog niet, maar ik kan alvast de eerste foto’s maken
Het is bijna onvoorstelbaar dat er uit deze kleine doosjes een ca. 1200mm. grote Octocopter ontstaat.

Klik hier voor een grotere foto!
Dit zijn de Motoren van Tiger-Motors.

Klik hier voor een grotere foto!
De Turnigy Plush 40A ESC met programming Card.

Klik hier voor een grotere foto!
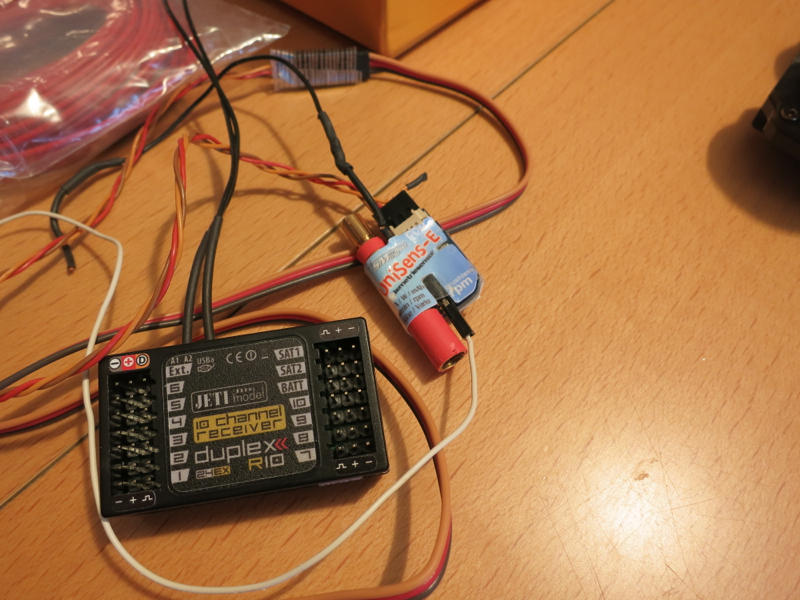
De Jeti R10 ontvanger en het UniSens-E Telemetrie modul die ik samen met een anti-spark ga gebruiken voor de Ironman.
Klik hier voor een grotere foto!
De mainplate van de Ironman was al kant en klaar in elkaar geschroefd, maar ik heb er alle klemmen afgemonteerd.
Dat waren dus 48 schroeven....
Ik heb dat gedaan omdat ik de gele klemmer eruit wil hebben.
Die passen gewoon weg niet bij dit mooie frame.
Ïk ga die dan ook vervangen door zwarte klemmen die ik er extra bij heb besteld.
Ook zie je hier de 2 Powerboards.
Ik ga hier 1 powerboard met 16 plugs van maken.
Veel solderen, maar dat vind ik wel leuk.

Klik hier voor een grotere foto!
Hier heb ik de motor mounts al op de armen gemonteerd en de Tiger Motoren er m.b.v. de blauwe uhu lak erop geschroefd.
Dat zit muurvast en de schroefjes kunner er niet uittrillen.

Klik hier voor een grotere foto!
De kabels van de motor passen precies door de bovenste opening van de mount. Ziet er heel goed uit zo.

Klik hier voor een grotere foto!
De armen zijn van uitstekende kwaliteit en heel erg stevig.

Klik hier voor een grotere foto!
De Tiger Motoren hebben hele flexibele en 60 cm. lange kabels. Dat is best wel handig en voor een mutlirotor optimaal.

Klik hier voor een grotere foto!
Zoals je hier kunt zien......

Klik hier voor een grotere foto!
...heb ik nog heel wat werk te doen.

Klik hier voor een grotere foto!
Tot nu toe heb ik alleen de armen klaar.
Elke arm weegt ca. 300 gram zonder propeller.
De volgende stap is de kabels voor de verlichting erdoor trekken, en het Mainframe met alleen maar de zwarte klemmen weer in elkaar zetten.
Groetjes,
Jordy
Zoals beloofd in dit draadje, begin ik hier een klein bouwberichtje van mijn Tarot Ironman 1000.
Ik ga er op m’n gemak mee beginnen en ik heb geen haast.
De Iromnan 1000 ga ik alleen maar voor de fun vliegen.
Het wordt geen foto-drone maar meer een platform voor diverse experimenten.
Meer zal ik hier nog niet verklappen....
Ik ben geen professionele bouwer, maar ik hou wel van perfectie.
Ik probeer dus zo mooi mogelijk te bouwen, maar doe dat wel in een rustig tempo.
Verwacht dus geen wonderen van mij.
Als jullie iets zien wat sub-optimaal is, dan vertel het mij A.U.B.
Ik heb altijd een oor open voor de meer ervarene modelbouwers.
Van jullie kan ik nog veel leren!
Ik vlieg sinds een paar jaar diverse zweefvliegtuigen en een paar motor vliegtuigen.
Begin dit jaar heb ik voor de fun een DJI Phantom gekocht en ik was er meteen weg van.
Alleen de „speelgoed zender“ beviel me niet dus was de Phantom weer snel verkocht.
Ik heb toen zelf m’n eerste multi-rotor (op)gebouwd.
Een DJI F550 met alle toeters en bellen.
De Tarot Ironman 1000 gaat nu mijn DJI F550 vervangen.
De volgende componenten ga ik verbouwen.
- Tarot Ironman 1000 Frame
- 8x Tiger Motors MN3515-15 met 400kv
- 8 x Turnigy Plush 40A regelaars
- 2 x Power Distribution Board
- 8 x RCTimer 15 x 7.5 CFK propellers
- 1 x DJI Naza-M v2 met GPS
- 1 x DJI BTU Bluetooth modul
- 1 x Jeti R10 ontvanger
- 1 x UniSens-E 5.5mm Telemetrie sensor
- 2 x SLS APL 5s 5000mAh 30+ Lipo (als 5s 10000mAh)
- Diverse kabeltjes, stekkers, verlichting etc... etc...
Een paar dingetjes zijn er nog niet, maar ik kan alvast de eerste foto’s maken
Het is bijna onvoorstelbaar dat er uit deze kleine doosjes een ca. 1200mm. grote Octocopter ontstaat.
Klik hier voor een grotere foto!
Dit zijn de Motoren van Tiger-Motors.
Klik hier voor een grotere foto!
De Turnigy Plush 40A ESC met programming Card.
Klik hier voor een grotere foto!
De Jeti R10 ontvanger en het UniSens-E Telemetrie modul die ik samen met een anti-spark ga gebruiken voor de Ironman.
Klik hier voor een grotere foto!
De mainplate van de Ironman was al kant en klaar in elkaar geschroefd, maar ik heb er alle klemmen afgemonteerd.
Dat waren dus 48 schroeven....
Ik heb dat gedaan omdat ik de gele klemmer eruit wil hebben.
Die passen gewoon weg niet bij dit mooie frame.
Ïk ga die dan ook vervangen door zwarte klemmen die ik er extra bij heb besteld.
Ook zie je hier de 2 Powerboards.
Ik ga hier 1 powerboard met 16 plugs van maken.
Veel solderen, maar dat vind ik wel leuk.
Klik hier voor een grotere foto!
Hier heb ik de motor mounts al op de armen gemonteerd en de Tiger Motoren er m.b.v. de blauwe uhu lak erop geschroefd.
Dat zit muurvast en de schroefjes kunner er niet uittrillen.
Klik hier voor een grotere foto!
De kabels van de motor passen precies door de bovenste opening van de mount. Ziet er heel goed uit zo.
Klik hier voor een grotere foto!
De armen zijn van uitstekende kwaliteit en heel erg stevig.
Klik hier voor een grotere foto!
De Tiger Motoren hebben hele flexibele en 60 cm. lange kabels. Dat is best wel handig en voor een mutlirotor optimaal.
Klik hier voor een grotere foto!
Zoals je hier kunt zien......
Klik hier voor een grotere foto!
...heb ik nog heel wat werk te doen.
Klik hier voor een grotere foto!
Tot nu toe heb ik alleen de armen klaar.
Elke arm weegt ca. 300 gram zonder propeller.
De volgende stap is de kabels voor de verlichting erdoor trekken, en het Mainframe met alleen maar de zwarte klemmen weer in elkaar zetten.
Groetjes,
Jordy
 nweer::bad-words:
nweer::bad-words:




