Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Mini H quad 2000kv
- Topicstarter thana
- Startdatum
Ik heb een mini H met rctimer 2000kv op 5x4.5 props. Als je me PID's moet hebben, stuur dan even een pb. Me regelaren zijn BLHeli en draai een naze32
Overigens zou de quad al redelijk stabiel moeten zijn op standaard pid's. Anders heb je misschien last van propvibratie

Over die Autotune, werkt dat echt? Ik heb namelijk voorlopig nog standaard settings in m'n mini H zitten en hij vliegt op zich wel goed maar bij hogere throttle/snelle acceleratie gaat hij enorm "trillen", precies een hoogtoerige motor die tegen de begrenzer slaat (als je begrijpt wat ik bedoel  ) Vroeger was dat opgelost met TPA in baseflight, maar ik heb me laten vertellen dat het in cleanflight niet zo is?
) Vroeger was dat opgelost met TPA in baseflight, maar ik heb me laten vertellen dat het in cleanflight niet zo is?
) Vroeger was dat opgelost met TPA in baseflight, maar ik heb me laten vertellen dat het in cleanflight niet zo is?BorisB
Forum veteraan
in cleanflight werkt tpa ook net als in baseflight.
Alleen sommige pid controllers ondersteunen het niet.
Wel tpa: 0, 3, 4 en 5
geen tpa: 1 en 2
Bij pid 1 en 2 komt de support in de volgende release wellicht beschikbaar.
Ik heb hier een beta versie van wat goed werkt.
Autotune werkt niet echt nee. Is meer een fun feature en verhoogt alleen de standaard settings en doet zelfs soms onverwachte dingen.
Als je pid controller 1 pakt voor acro is tuning een eitje bijvoorbeeld. Je hebt een hele brede scala aan pids wat werkt en is default al goed.
Alleen sommige pid controllers ondersteunen het niet.
Wel tpa: 0, 3, 4 en 5
geen tpa: 1 en 2
Bij pid 1 en 2 komt de support in de volgende release wellicht beschikbaar.
Ik heb hier een beta versie van wat goed werkt.
Autotune werkt niet echt nee. Is meer een fun feature en verhoogt alleen de standaard settings en doet zelfs soms onverwachte dingen.
Als je pid controller 1 pakt voor acro is tuning een eitje bijvoorbeeld. Je hebt een hele brede scala aan pids wat werkt en is default al goed.
Ik ben nog redelijk nieuw in het tunen van de PID's en heb dus ook gewoon alles standaard staan momenteel. nooit zin gehad om er in te gaan prutsen, maar nu ga ik toch eens deftig beginnen. Heb de standaard gekochte naze naar cleanflight geflashed and that's it. Weet niet welke PID controller er dan geselecteerd staat. Wordt er over het algemeen een voorkeur gegeven aan een bepaalde controller?
het is verlengd weekend dus ik maar waarschijnlijk wel eens werk van het goed afstellen van m'n Naze")
EDIT: Boris jij zegt dat nr 1 goed werkt "out of the box", dus hier zou ik dat getril standaard al niet mogen waarnemen? Maar stel dat je met een bepaalde setup toch zo een gedrag hebt, is het dan op te lossen met een andere weg dan TPA aangezien deze niet aanwezig is in deze controller?
het is verlengd weekend dus ik maar waarschijnlijk wel eens werk van het goed afstellen van m'n Naze
EDIT: Boris jij zegt dat nr 1 goed werkt "out of the box", dus hier zou ik dat getril standaard al niet mogen waarnemen? Maar stel dat je met een bepaalde setup toch zo een gedrag hebt, is het dan op te lossen met een andere weg dan TPA aangezien deze niet aanwezig is in deze controller?
BorisB
Forum veteraan
Jij vliegt toch op kk2?Met PID controller 0 werkt autotune EN TPA gewoon. Ik heb nog geen reden om te switchen, vliegt gewoon goed.
Het werkt op alle pid controllers. Alleen het tuned niet zoals het zou moeten. Het verhoogd de gains alleen.
Doe het 10x en heb je 10x hele andere waardes.
Misschien heeft de volgende cleanflight versie gtune wat veel beter werkt.
Ik ben nog redelijk nieuw in het tunen van de PID's en heb dus ook gewoon alles standaard staan momenteel. nooit zin gehad om er in te gaan prutsen, maar nu ga ik toch eens deftig beginnen. Heb de standaard gekochte naze naar cleanflight geflashed and that's it. Weet niet welke PID controller er dan geselecteerd staat. Wordt er over het algemeen een voorkeur gegeven aan een bepaalde controller?
het is verlengd weekend dus ik maar waarschijnlijk wel eens werk van het goed afstellen van m'n Naze
EDIT: Boris jij zegt dat nr 1 goed werkt "out of the box", dus hier zou ik dat getril standaard al niet mogen waarnemen? Maar stel dat je met een bepaalde setup toch zo een gedrag hebt, is het dan op te lossen met een andere weg dan TPA aangezien deze niet aanwezig is in deze controller?
PID1 standaard waardes zitten er meestal niet ver naast nee.
Alleen level P mag flink omlaag en verder niet.
Horizon mode is alleen niet geweldig, maar als je die niet gebruikt is het verder goed.
PID0 zal op de meeste low power setups prima werken en met standaard pids. ga je 4S setups gebruiken is het zeer gevoelig voor oscillaties en zeker bij meer throttle.
Het is allemaal persoonlijk wat je fijner vindt en als je niet veel vraagt van je fc dan is default 0 ook goed.
BorisB
Forum veteraan
hier manual over autotune (lees warning):
https://github.com/cleanflight/cleanflight/blob/master/docs/Autotune.md
Ik zou geen risico nemen op het moment met autotune. Wacht op gtune.
https://github.com/cleanflight/cleanflight/blob/master/docs/Autotune.md
Ik zou geen risico nemen op het moment met autotune. Wacht op gtune.
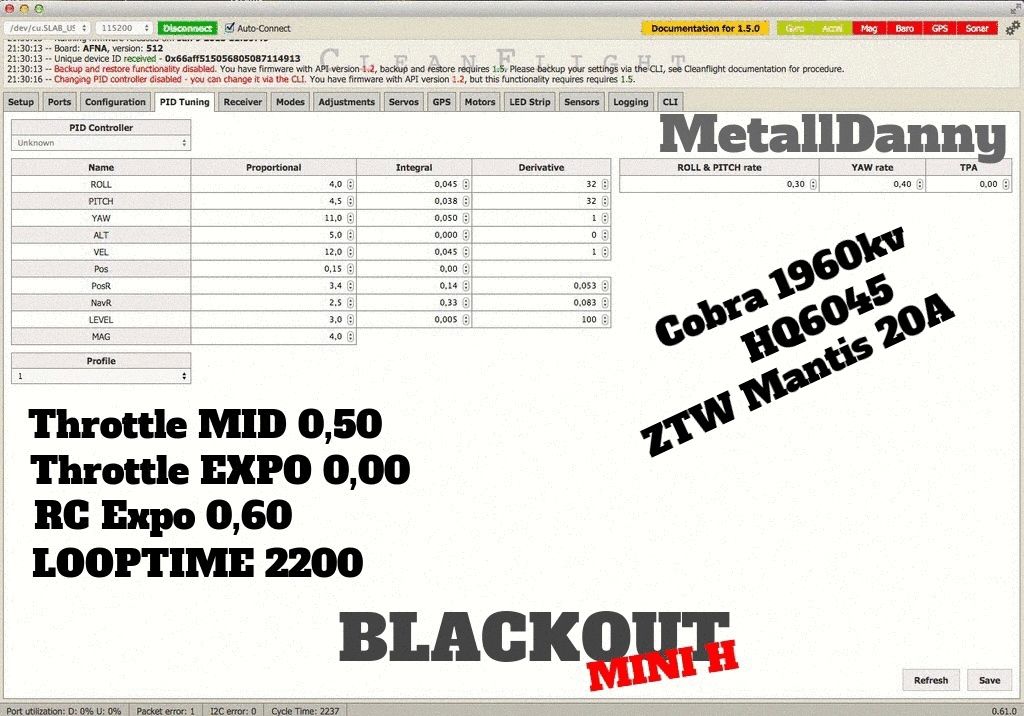
Auto tune werkt voor geen meter (mijn mening)
als je een super-lock-in mini wilt vliegen moet je gewoon zelf tunen
dit is een goede start
Pidcontroller #1 (staat nu nog unknown bij)
denk dat je de Roll P en de Pitch P 0.3 lager kan zetten op 2000kv Cobras
als je een super-lock-in mini wilt vliegen moet je gewoon zelf tunen
dit is een goede start
Pidcontroller #1 (staat nu nog unknown bij)
denk dat je de Roll P en de Pitch P 0.3 lager kan zetten op 2000kv Cobras

BorisB
Forum veteraan
als je goed bovenstaande instructies leest dan zie je dat het niet goed werkt en dat het vervangen zal worden door gtune [emoji1]Autotune werkt prima, ik doe niks anders.
Goed de instructie lezen en je quad vliegt heerlijk binnen 5 minuten.